- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Tool/software:
Hi expert,
I am planning to use IWRL6432BOOST to obtain ADC data by "SPI-based streaming procedure" in the xWRL6432 MMWAVE-L-SDK 05.04.00.01 User's Guide.
I am currently preparing the C232HM-DDHSL-0 cable, and plan to start this as soon as I get it.
I understand that the procedure is as follows, but please let me know if there are any mistakes.
I can use the following projects:
MMWAVE_L_SDK_05_04_00_01\examples\mmw_demo\mmwave_demo\xwrL64xx-evm\m4fss0-0_freertos\ti-arm-clang
For this project, I define SPI_ADC_DATA_STREAMING=1 and build in Release mode.
I write the made mmwave_demo.Release.appimage to Flash using Visualizer and run the appimage.
(I understand that I need to set the DIP SW to function and set SW1.6=ON.)
I would like to confirm the setup for using adcDataSPIFTDI.exe.
Should I prepare a C232HM-DDHSL-0 cable, install the FTDI USB driver, download the DLL, and place ftd2xx.dll, ftd2xx64.dll in the current directory?
I'm going to enter CLI commands using , but should I enter the sensor parameter command, run the adcDataSPIFTDI.exe application, and then start the sensorStart?
ex.)
sensorStop 0
channelCfg 7 3 0
chirpComnCfg 8 0 0 256 4 28 0
chirpTimingCfg 6 63 0 75 60
frameCfg 2 0 200 64 250 0
guiMonitor 2 1 0 0 0 1 0 0 0 0 0
sigProcChainCfg 32 2 1 0 4 4 0 15
cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1
aoaFovCfg -60 60 -40 40
rangeSelCfg 0.1 12.0
clutterRemoval 1
compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000
adcLogging 2
lowPowerCfg 0
factoryCalibCfg 1 0 40 0 0x1ff000
sensorPosition 0 0 1.44 0 0
adcDataSPIFTDI.exe
"1" for AOP
"2" for FCCSP
Enter Device:
2
Enter no of adc samples:
256
Enter no of chirps per burst:
2
Enter no of bursts per frame:
64
Enter no of frames:
0
Enter no of rx antennas:
3
sensorStart 0 0 0 0
Can I get ADC data(adcdata.txt) using this method?
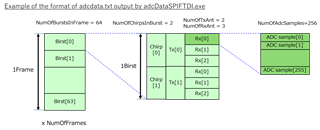
Where can I see the format of adcdata.txt?
Best regards,