Other Parts Discussed in Thread: AWR1843, , AWR1642
Tool/software:
Hai.......,
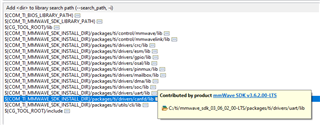
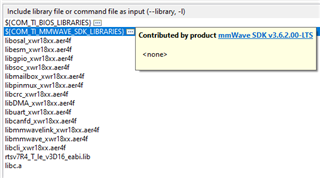
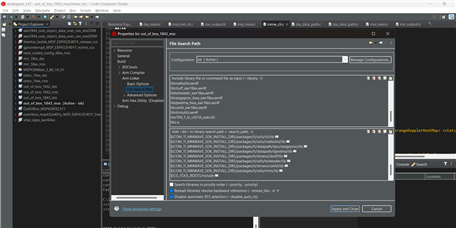
We was trying to adding the functionality of CAN in Out_of_Demo _1843 from Radar Toolbox-2.10.00.04.
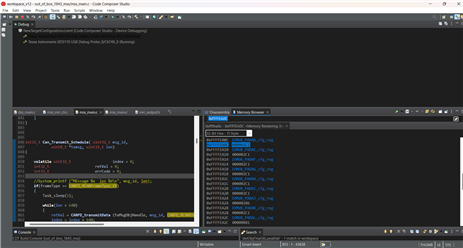
I followed the document " Adding CAN-FD Tx and Rx to an Existing mmWave Project" but still it is not working.....when i went through the mmw_cli,c in OOB demo I found UART_writePolling function there.
In the main.c file i have done all the procedures done as the document.....when it was not working i deeped dived into Out_of_Demo _1843 and I found in mmw_cli.c file UART_writePolling function is called.
So should i aslo call Can_Transmit_Schedule function in mmw_cli.c .
Thanks,
Rehman