


Tool/software:
Dear Texas Instruments Team,
I am using the TMAG5253 in a game controller for the trigger functionality. The TMAG5253EVM helped me design the mechanism, but I have a few questions.
First, let me explain my setup. Below is an image showing the configuration similar to TMAG5253EVM but as you can see, there is a strong neodymium magnet beside the sensor, causing a constant magnetic flux density of 3-10 mT (measured using TIMSS).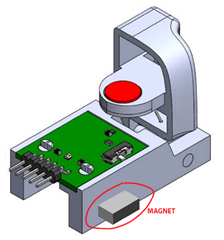
When I use the same configuration as the TMAG5253EVM, which has a TMAG5253A1DMR sensor with a magnetic sensitivity of ±20 mT, I am losing the detection range. Therefore, I assume I need to choose either the A2: ±40 mT or the A3: ±80 mT sensor variant. Also, I believe the TMAG5253EVM uses a ferrite magnet considering the low sensitivity of the sensor used. However, I think I can't do the same because I need to overcome 10 mT and choose a magnet that can produce a maximum magnetic flux density around ±40 mT or ±80 mT, depending on the sensor.
My questions are:
- Is my method correct for deciding which magnet to use?
- How do I choose between the ±40 mT or ±80 mT sensor variants? Does it solely depend on the magnet I use?
- Should I opt for the ±80 mT sensor variant considering the presence of a nearby magnet and to account for a safety margin?
Thank you for your valuable assistance.
