Other Parts Discussed in Thread: SYSCONFIG, AWRL6432, AWRL1432
Tool/software:
We refer to the examples code radar_toolbox_2_10_00_04-Kick_to_Open
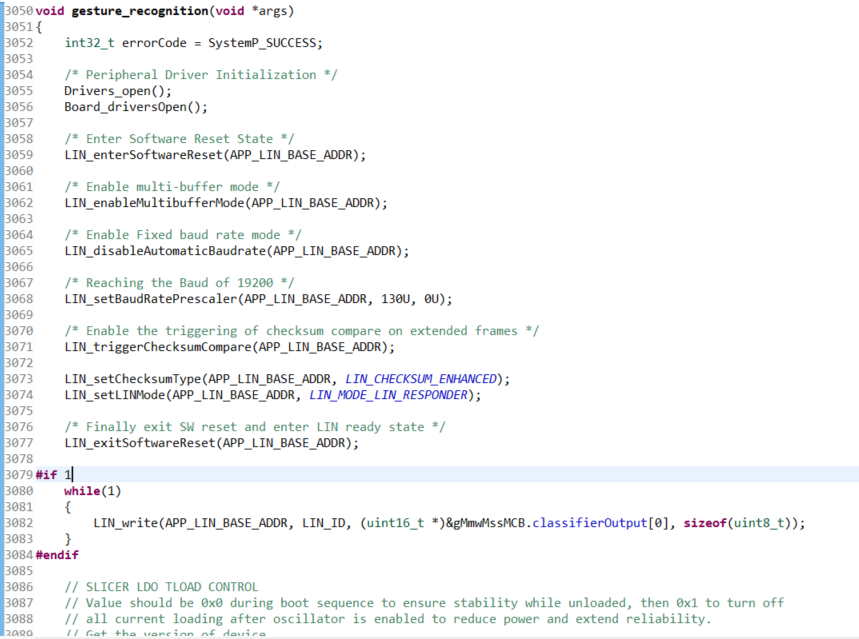
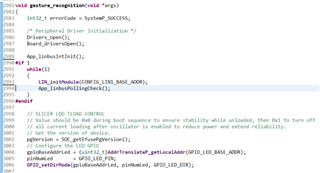
Added MMWAVE_L_SDK_05_05_00_02-lin_external_responder_interrupts
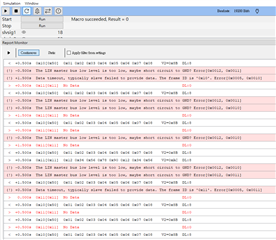
To add the lin bus function, after the program starts, only send and receive commands once and there will be no lin bus messages.
Is it not possible to use the interrupt method to use the lin bus function in Kick_to_Open? Do you have any other suggestions? Thank you!