- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Dear TechnicalSupport
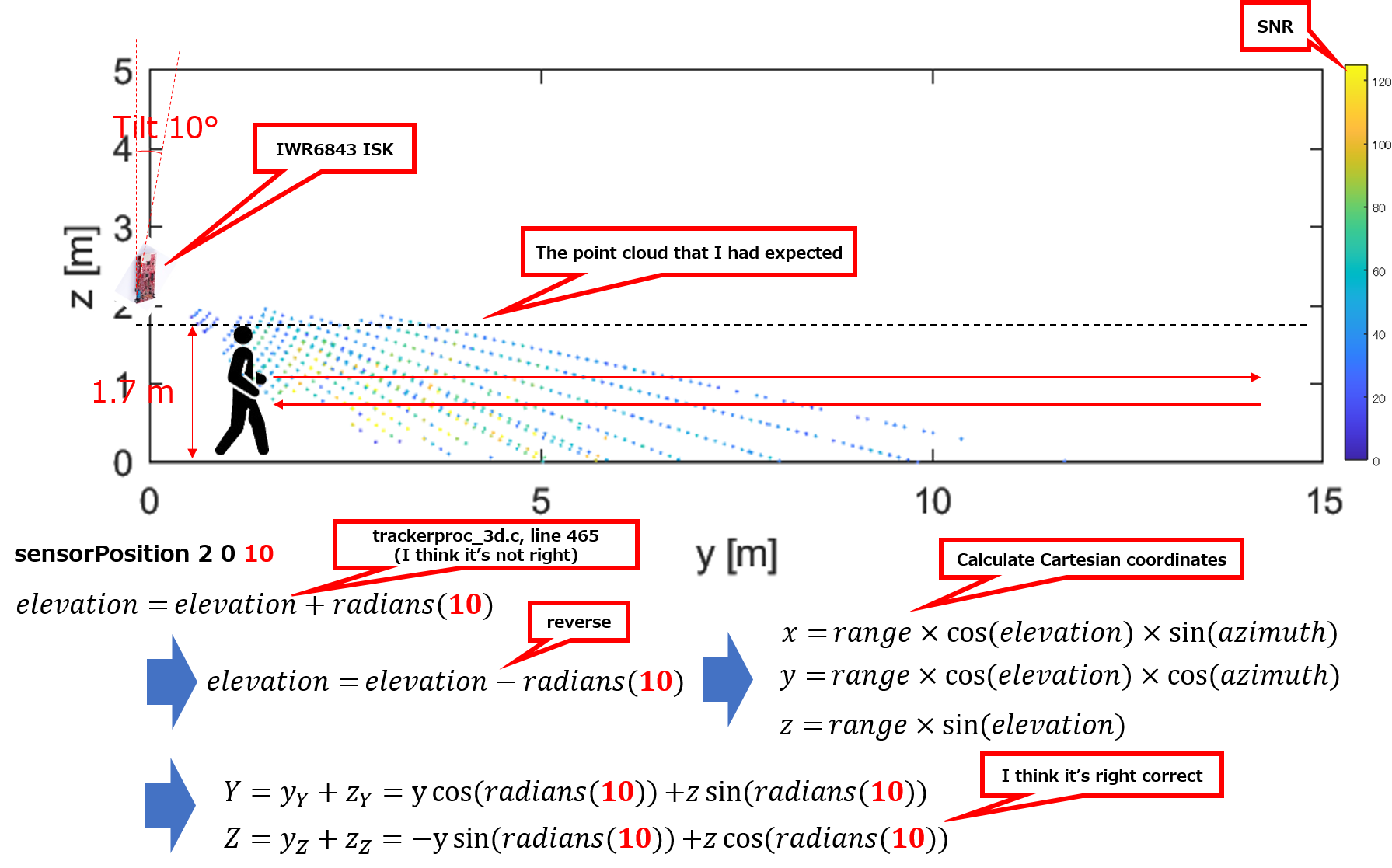
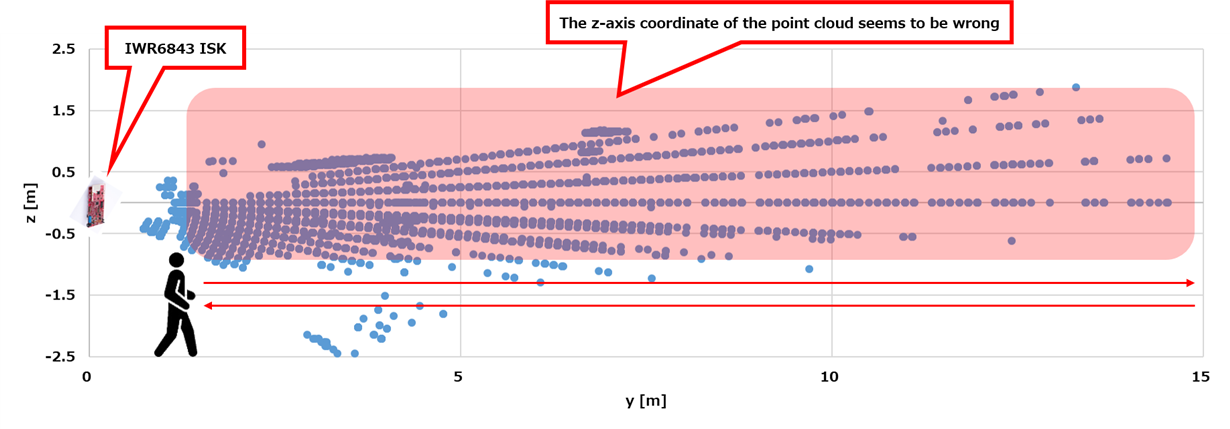
I use IWR6843 ISK(ES2.0) following FW was burned.
C:\ti\mmwave_industrial_toolbox_4_2_1\labs\people_counting\68xx_3D_people_counting\prebuilt_binaries\3D_people_count_68xx_demo.bin


C:\ti\mmwave_industrial_toolbox_4_2_1\labs\long_range_people_detection\68xx_long_range_people_det\prebuilt_binaries\long_range_people_det_68xx_demo.bin
Best Regards