


Part Number: IWR6843AOPEVM
Other Parts Discussed in Thread: IWR6843AOP
Hello,
I try to get the “Autonomous Robotics with ROS for mmWave”- Demo (https://dev.ti.com/tirex/explore/node?node=AC6pKB9hdX.bUVq9BRtxKQ__VLyFKFf__LATEST) running.
I’m using an IWR6843AOP Package, Ubuntu 18.04.5 LTS (bionic) and ROS melodic. So it’s not the original environment it was designed for, but I hoped it would still be compatible.
But when I try “roslaunch turtlebot_bringup minimal.launch mmwave_device:=6843AOP”, I get the following Error Message: 
A similar Error apears when I try “rosrun rviz rviz -d ~/catkin_ws/src/turtlebot_mmwave_launchers/launch/navigation_visualization.rviz”. RVIZ opens, but with nothing than a grid. When I add a robot, I get the following Error. I can fix that, when I change the fixed frame to “base_link”, but then I get a problem as soon as I try to add a map.
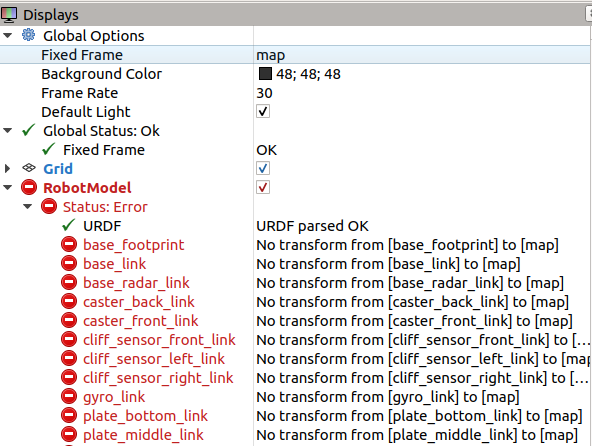
A new “static_transform_publisher” probably fix that problem, but I fear it’s not that simple, because in kinetic it’s supposed to run without new lines of code.
I’d be glad, if someone has an idea whats missing or how to solve that problem.
Thanks in advance!
Best Regards,
Anne-Mira

