Other Parts Discussed in Thread: PGA460, , ENERGIA
Hi ,
We have been trying to interface PGA460PSM-EVM with Arduino MEGA . We are planning to use 6 PGA460s and recieved all 6 of them. We tried the following procedures but not able to communicate with the pga460 module.
Our connections as follows
Arduino MEGA <===> PGA460PSM-EVM
TX1<===> RX ( A voltage divider which converts 5V logic to 3.3V logic
RX1 <===> TX (direct connection)
PWR <===>12V 1A supply
GND PGA460 <===>GND MEGA <===> POWER GND (common ground for all)
SCK pin is grounded with 10k resistor
The TEST pin is floating assuming the PGA460 works in 3.3V logic state .
At first
1. we tried using the ported energia libraries for arduino mega provided by Mr Akeem Whitehead in this link unfortunately we got
ERROR - did not recieve measurement results...
2. We then tried out this following code
//note: minimum requirement example used to send a burst/listen command to PGA460
//cmd 0 - p1 burst listen
byte buf0[4] = {0x55, 0x00, 0x01, 0xFE};
//cmd 1 - p2 burst listen
byte buf1[4] = {0x55, 0x01, 0x01, 0xFD};
//cmd 5 - ultrasonic measurement (assume UART_ADDR=0)
byte buf5[4] = {0x55, 0x05, 0xFA}; //change
//cmd 10 - register write decple to time of 4.096ms
byte buf10[5] = {0x55, 0x0A, 0x26, 0x00, 0xCF};
//cmd 17 - broadcast p1 burst listen
byte buf17[4] = {0x55, 0x11, 0x01, 0xED};
//cmd 19 - broadcast p1 listen only
byte buf19[4] = {0x55, 0x13, 0x01, 0xEB};
//cmd 25 - broadcast bulk threshold write
byte buf25[35] = {0x55, 0x19, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x84, 0x21, 0x08, 0x42, 0x10, 0x80, 0x80, 0x80, 0x80, 0x00, 0x88, 0x88, 0x88, 0x88, 0x88, 0x88, 0x84, 0x21, 0x08, 0x42, 0x10, 0x80, 0x80, 0x80, 0x80, 0x00, 0x7C};
unsigned char data;
const int buttonPin = 2; // the number of the pushbutton pin
const int ledPin = 13; // the number of the LED pin
int buttonState = 0; // variable for reading the pushbutton status
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(buttonPin, INPUT_PULLUP);
delay(1000);
// put your setup code here, to run once:
Serial.begin(19200);
Serial1.begin(19200,SERIAL_8N2); // initialize PGA460 UART serial channel SERIAL_8N2
delay(1000);
//assume UART_ADDR=0
//bulk threshold write mid-code values to clear THR_CRC_ERR
Serial1.write(buf25, sizeof(buf25));
delay(100);
// set UART_ADDR=0's time decouple to 4.096ms
Serial1.write(buf10, sizeof(buf10));
delay(100);
}
void loop() {
// put your main code here, to run repeatedly:
// check if the pushbutton is pressed.
while (digitalRead(buttonPin) == LOW){}
// broadcast p1 burst+listen (non-dependent on UART_ADDR)
Serial1.write(buf17, sizeof(buf17));
// delay by 100ms
delay(100);
//[TODO] print ultrasonic measurement results on terminal
// read back ultrasonic meas results from UART_ADDR=0
Serial1.write(buf5, sizeof(buf5));//Serial1
data = Serial1.read();
Serial.println(data);
// toggle red LED
digitalWrite(ledPin, !(digitalRead(ledPin))); // turn the LED on (HIGH is the voltage level)
// repeat loop every second
delay (1000);
}
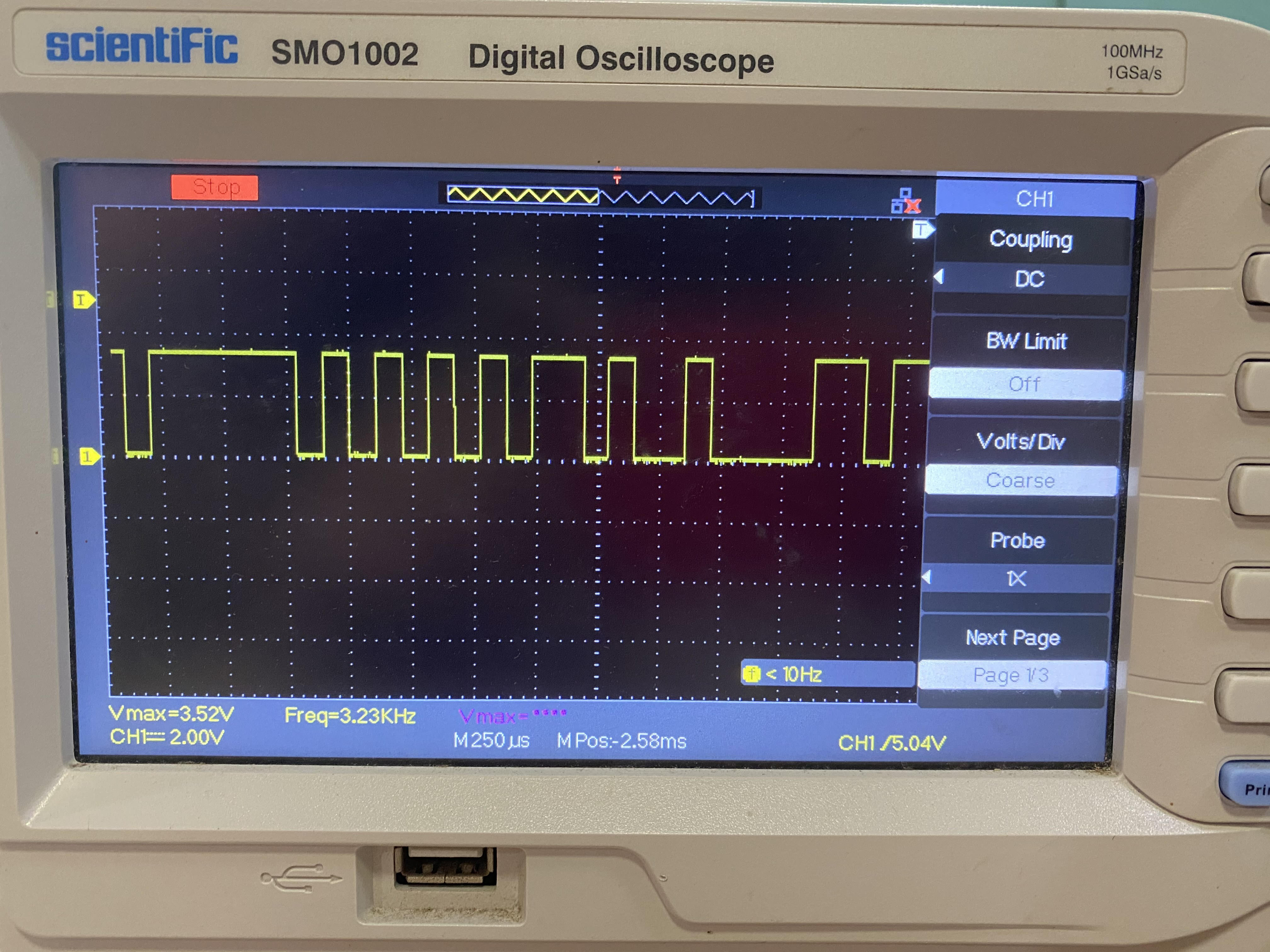
But we had 255 as output in our serial monitor ( even if the wires are removed ) , we think those are garbage values .
3. We just wanted to confirm if there is a communication between PGA460 and Arduino so we used the following example code .
unsigned char WriteByteArray[4] = { 0x55, 0x09, 0x1B, 0xDB };
unsigned char ReadByte1;
unsigned char ReadByte2;
unsigned char ReadByte3;
void setup()
{
Serial.begin(115200);
Serial1.begin(115200, SERIAL_8N2);
}
void loop()
{
Serial1.write(WriteByteArray,sizeof(WriteByteArray));
Serial1.flush();
ReadByte1 = Serial1.read();
ReadByte2 = Serial1.read();
ReadByte3 = Serial1.read();
Serial.println("ReadByte1 = ");
Serial.println(ReadByte1);
Serial.println("ReadByte2 = ");
Serial.println(ReadByte2);
Serial.println("ReadByte3 = ");
Serial.println(ReadByte3);
delay(1000);
}
Again we got 255 in ReadBytes 1 , 2 and 3 . Can you please guide us in establishing a communication? Akeem Whitehead1