


Other Parts Discussed in Thread: IWR1642, IWR6843
Hi,
I am experiencing a blind spot as described in:
https://e2e.ti.com/support/sensors/f/1023/t/740711
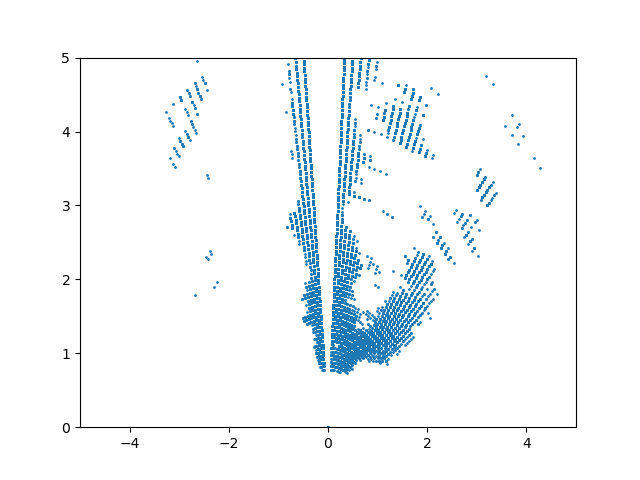
Here is a persistent plot of the the point clouds extracted from the UART frames. You can see me walking towards the sensor (and some colleagues).
I've just converted (r,theta) to (r*sin(theta),r*cos(theta) where r is the distance to sensor and theta the azimuth angle.
The same thing happens when using the people counting demo GUI on MAtlab, dots never pop on this area.
I am using people counting demo 2.2.0 from mmwave industrial toolbox 3.6.1 which should be the latest version.
I've just bought the EVM so it should be ES2.0. The marking of the SoC package is "IWR1642" and "502AC" appears on the left bottom corner.
Thanks for your help,
Massimo
