
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Tool/software: Code Composer Studio
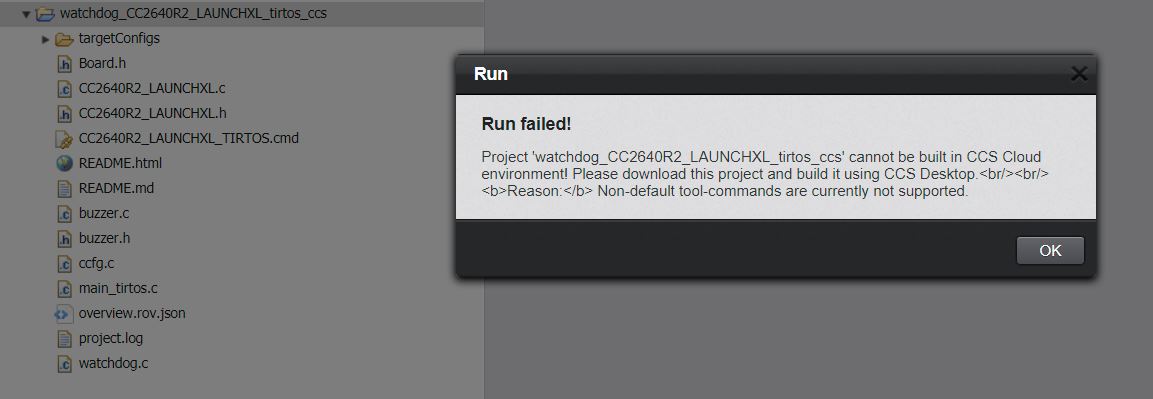
I have taken one of the TI Driver examples (watchdog) and attempted to modify to include some code to drive a tone buzzer. I thought I had this resolved, but I now get a new error. Note using CCS Desktop is a NON STARTER. I want to find an easy solution for CCS Cloud. I do not understand what "default tool-commands" the message is referring to.
I am using the following code which I found within another project (buzzer.c and buzzer.h). The only line of code I amended was in buzzer.c where I changed the timer reference library
#include <ti/devices/cc26x0/driverlib/timer.h>
/** ============================================================================
* @file buzzer.c
*
* @brief PWM-based buzzer interface.
* ============================================================================
*/
/* -----------------------------------------------------------------------------
* Includes
* ------------------------------------------------------------------------------
*/
// TI RTOS drivers
#include <ti/drivers/Power.h>
#include <ti/drivers/power/PowerCC26XX.h>
// Temporary PWM solution directly on DriverLib
// (until a Timer RTOS driver is in place)
#include <ti/drivers/pin/PINCC26XX.h>
#include <ti/devices/cc26x0/driverlib/timer.h>
#include "buzzer.h"
/* -----------------------------------------------------------------------------
* Local variables
* ------------------------------------------------------------------------------
*/
static PIN_Handle hPin = NULL;
/* -----------------------------------------------------------------------------
* Public Functions
* ------------------------------------------------------------------------------
*/
/*******************************************************************************
* @fn buzzerOpen
*
* @brief Initialize the Buzzer
*
* @descr Initializes pin and PWM
*
* @return -
*/
void buzzerOpen(PIN_Handle hGpioPin)
{
hPin = hGpioPin;
// Turn on PERIPH power domain and clock for GPT0 and GPIO
Power_setDependency(PowerCC26XX_PERIPH_GPT0);
Power_setConstraint(PowerCC26XX_SB_DISALLOW);
// Assign GPT0
TimerConfigure(GPT0_BASE, TIMER_CFG_SPLIT_PAIR | TIMER_CFG_A_PWM);
// Configure pin for PWM output
PINCC26XX_setMux(hPin, Board_BUZZER, IOC_PORT_MCU_PORT_EVENT0);
}
/*******************************************************************************
* @fn buzzerSetFrequency
*
* @brief Set the frequency (3Hz - 8 KHz)
*
* @return return true if the requency is within range
*/
bool buzzerSetFrequency(uint16_t freq)
{
uint32_t ticks;
uint32_t loadLow;
uint32_t loadHigh;
uint32_t matchLow;
uint32_t matchHigh;
if (freq < BUZZER_FREQ_MIN && freq > BUZZER_FREQ_MAX)
{
return false;
}
// Stop timer during reconfiguration
TimerDisable(GPT0_BASE, TIMER_A);
// Calculate timer load and match values
ticks = 48000000 / freq;
loadLow = ticks & 0x0000FFFF;
loadHigh = (ticks & 0x00FF0000) >> 16;
matchLow = (ticks / 2) & 0x0000FFFF;
matchHigh = ((ticks / 2) & 0x00FF0000) >> 16;
// Set timer load
TimerLoadSet(GPT0_BASE, TIMER_A, loadLow);
TimerPrescaleSet(GPT0_BASE, TIMER_A, loadHigh);
// Set timer match
TimerMatchSet(GPT0_BASE, TIMER_BOTH, matchLow);
TimerPrescaleMatchSet(GPT0_BASE, TIMER_A, matchHigh);
// Start timer
TimerEnable(GPT0_BASE, TIMER_A);
return true;
}
/*******************************************************************************
* @fn buzzerClose
*
* @brief Closes the buzzer interface
*
* @return -
*/
void buzzerClose()
{
// Configure pin as GPIO
PINCC26XX_setMux(hPin, Board_BUZZER, IOC_PORT_GPIO);
// Turn off PERIPH power domain and clock for GPT0
Power_releaseDependency(PowerCC26XX_PERIPH_GPT0);
Power_releaseConstraint(PowerCC26XX_SB_DISALLOW);
}Buzzer.h:
/** ============================================================================
* @file buzzer.h
*
* @brief PWM-based buzzer interface.
*
* ============================================================================
*/
#ifndef _BUZZER_H_
#define _BUZZER_H_
/* -----------------------------------------------------------------------------
* Includes
* ------------------------------------------------------------------------------
*/
#include "Board.h"
/* -----------------------------------------------------------------------------
* Constants
* ------------------------------------------------------------------------------
*/
#define BUZZER_FREQ_MIN 3
#define BUZZER_FREQ_MAX 8000
/* -----------------------------------------------------------------------------
* Functions
* ------------------------------------------------------------------------------
*/
void buzzerOpen(PIN_Handle hPinGpio);
bool buzzerSetFrequency(uint16_t frequency);
void buzzerClose(void);
#endif
My main project file watchdog.c was amended as follows:
/*
* ======== watchdog.c ========
*/
#include <unistd.h>
#include <stdbool.h>
#include <stdint.h>
#include <stddef.h>
/* TI-RTOS Header files */
#include <ti/drivers/PIN.h>
#include <ti/drivers/Watchdog.h>
/* Example/Board Header files */
#include "Board.h"
/* new buzzer implementation */
#include "buzzer.h"
/* buzzer frequency for this application */
#define BUZZER_FREQUENCY 1000
/* Global memory storage for a PIN_Config table */
static PIN_State ledPinState;
static PIN_State buttonPinState;
//static PIN_State buzzerPinState;
/* Pin driver handles */
static PIN_Handle ledPinHandle;
static PIN_Handle buttonPinHandle;
static PIN_Handle buzzerPinHandle;
/*
* Application LED pin configuration table:
* - Board_PIN_LED0 is initially off.
*/
PIN_Config ledPinTable[] = {
Board_PIN_LED0 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
PIN_TERMINATE
};
/*
* Application button pin configuration table:
*/
PIN_Config buttonPinTable[] = {
Board_PIN_BUTTON0 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_POSEDGE,
PIN_TERMINATE
};
/*
* Application buzzer pin configuration table:
* - Board_PIN_BUZZER is initially off.
*/
PIN_Config buzzerPinTable[] = {
Board_PIN_BUZZER | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
PIN_TERMINATE
};
bool serviceFlag = true;
bool watchdogExpired = false;
Watchdog_Handle watchdogHandle;
/*
* ======== watchdogCallback ========
* Watchdog interrupt callback function.
*/
void watchdogCallback(uintptr_t unused)
{
/* Clear watchdog interrupt flag */
Watchdog_clear(watchdogHandle);
watchdogExpired = true;
/* Insert timeout handling code here. */
}
/*
* ======== pinButtonFxn ========
* Callback function for the GPIO interrupt on Board_PIN_BUTTON0.
*/
void pinButtonFxn(PIN_Handle handle, PIN_Id pinId)
{
/* Clear serviceFlag to stop continuously servicing the watchdog */
serviceFlag = false;
}
/*
* ======== main ========
*/
void *mainThread(void *arg0)
{
Watchdog_Params params;
/* Call board init functions */
Watchdog_init();
/* Open LED pin */
ledPinHandle = PIN_open(&ledPinState, ledPinTable);
if(!ledPinHandle) {
/* Error initializing board LED pin */
while (1);
}
/* Turn OFF user LED */
PIN_setOutputValue(ledPinHandle, Board_PIN_LED0, 0);
/* Setup callback for button pin */
buttonPinHandle = PIN_open(&buttonPinState, buttonPinTable);
if(!buttonPinHandle) {
/* Error initializing button pins */
while (1);
}
if (PIN_registerIntCb(buttonPinHandle, &pinButtonFxn) != 0) {
/* Error registering button callback function */
while (1);
}
PIN_setInterrupt(buttonPinHandle, Board_PIN_BUTTON0|PIN_IRQ_POSEDGE);
/* Create and enable a Watchdog with resets disabled */
Watchdog_Params_init(¶ms);
params.callbackFxn = (Watchdog_Callback)watchdogCallback;
params.resetMode = Watchdog_RESET_OFF;
watchdogHandle = Watchdog_open(Board_WATCHDOG0, ¶ms);
if (watchdogHandle == NULL) {
/* Error opening Watchdog */
while (1);
}
/* Enter continous loop */
while (true) {
/* Service watchdog if serviceFlag is true */
if (serviceFlag) {
Watchdog_clear(watchdogHandle);
}
/* If watchdog expired since last started, turn ON LED */
if (watchdogExpired) {
PIN_setOutputValue(ledPinHandle, Board_PIN_LED0, 1);
// Turn on sound
buzzerOpen(buttonPinHandle);
buzzerSetFrequency(BUZZER_FREQUENCY);
sleep(5);
Watchdog_clear(watchdogHandle);
serviceFlag = true;
watchdogExpired = false;
PIN_setOutputValue(ledPinHandle, Board_PIN_LED0, 0);
// Turn off sound
buzzerClose();
}
}
}I then added the following to my local Board.h file:
#define Board_GPIO_BUZZER CC2640R2_LAUNCHXL_GPIO_BUZZER
#define Board_PIN_BUZZER CC2640R2_LAUNCHXL_PIN_BUZZER
/* Buzzer */ #define CC2640R2_LAUNCHXL_PIN_BUZZER IOID_15
/*!
* @def CC2640R2_LAUNCHXL_GPIOName
* @brief Enum of GPIO names
*/
typedef enum CC2640R2_LAUNCHXL_GPIOName {
CC2640R2_LAUNCHXL_GPIO_S1 = 0,
CC2640R2_LAUNCHXL_GPIO_S2,
CC2640R2_LAUNCHXL_GPIO_BUZZER,
CC2640R2_LAUNCHXL_GPIO_LED_GREEN,
CC2640R2_LAUNCHXL_GPIO_LED_RED,
CC2640R2_LAUNCHXL_GPIO_SPI_FLASH_CS,
CC2640R2_LAUNCHXL_GPIOCOUNT
} CC2640R2_LAUNCHXL_GPIOName;
GPIO_PinConfig gpioPinConfigs[] = {
/* Input pins */
GPIOCC26XX_DIO_13 | GPIO_CFG_IN_PU | GPIO_CFG_IN_INT_RISING, /* Button 0 */
GPIOCC26XX_DIO_14 | GPIO_CFG_IN_PU | GPIO_CFG_IN_INT_RISING, /* Button 1 */
/* Output pins */
GPIOCC26XX_DIO_15 | GPIO_CFG_OUT_STD | GPIO_CFG_OUT_STR_HIGH | GPIO_CFG_OUT_LOW, /* Tone Buzzer */
GPIOCC26XX_DIO_07 | GPIO_CFG_OUT_STD | GPIO_CFG_OUT_STR_HIGH | GPIO_CFG_OUT_LOW, /* Green LED */
GPIOCC26XX_DIO_06 | GPIO_CFG_OUT_STD | GPIO_CFG_OUT_STR_HIGH | GPIO_CFG_OUT_LOW, /* Red LED */
/* SPI Flash CSN */
GPIOCC26XX_DIO_20 | GPIO_CFG_OUT_STD | GPIO_CFG_OUT_STR_HIGH | GPIO_CFG_OUT_HIGH,
};
const PIN_Config BoardGpioInitTable[] = {
CC2640R2_LAUNCHXL_PIN_BUZZER | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* New Buzzer output definition */
CC2640R2_LAUNCHXL_PIN_RLED | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* LED initially off */
CC2640R2_LAUNCHXL_PIN_GLED | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* LED initially off */
CC2640R2_LAUNCHXL_PIN_BTN1 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_BOTHEDGES | PIN_HYSTERESIS, /* Button is active low */
CC2640R2_LAUNCHXL_PIN_BTN2 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_BOTHEDGES | PIN_HYSTERESIS, /* Button is active low */
CC2640R2_LAUNCHXL_SPI_FLASH_CS | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MIN, /* External flash chip select */
CC2640R2_LAUNCHXL_UART_RX | PIN_INPUT_EN | PIN_PULLDOWN, /* UART RX via debugger back channel */
CC2640R2_LAUNCHXL_UART_TX | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL, /* UART TX via debugger back channel */
CC2640R2_LAUNCHXL_SPI0_MOSI | PIN_INPUT_EN | PIN_PULLDOWN, /* SPI master out - slave in */
CC2640R2_LAUNCHXL_SPI0_MISO | PIN_INPUT_EN | PIN_PULLDOWN, /* SPI master in - slave out */
CC2640R2_LAUNCHXL_SPI0_CLK | PIN_INPUT_EN | PIN_PULLDOWN, /* SPI clock */
PIN_TERMINATE
};




