


Other Parts Discussed in Thread: MSP-EXP430FR6989
Hello,
my name is Ivan Goljer and I am a student at the Slovak university of technology in Bratislava. I have questions regarding to sensorless position/speed DC motor control (TIDA-01421).
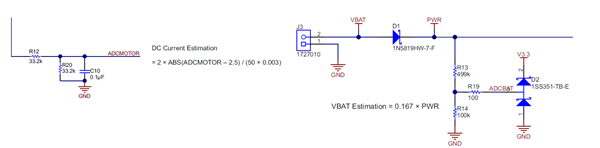
1. Desciption of MCU function in circuit and explanation of equations in picture below.
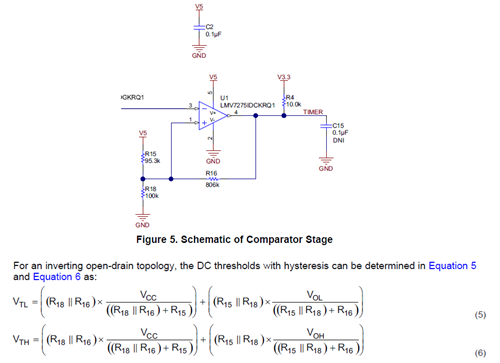
2. Explanation of equations 5,6, (especially parallel R18 and R16 based on picture).
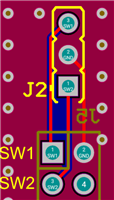
3. Explanation of J2 connection between PCB and MSP-EXP430FR6989.
4 Would it be possible to provide a code to understand the function of the MCU?
Thank you.
Regards, Ivan
