Other Parts Discussed in Thread: TMP112,
IC:CC1310F128RHB
Use case :rfEasyLinkTX....nortos_css
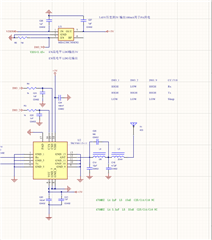
my demo RF PA SKY66115 ,LDO controls the SKY66115 power supply, LDO EN is IOID_9.
IOID_8 is tmp112 power
my demo mcu use pin IOID_2, IOID_1 ,IOID_9,IOID_8 ,
I currently only achieve GPIO high-->send data--> sleep
But the consumption current is relatively large, does not meet the actual use requirements
Program assumption:
CC1310 The system is powered on and enters the sleep state-->GPIO high-->send data
-->GPIO off --> sleep
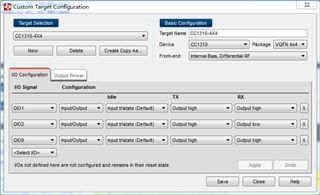
Q1.How to set CC1310 GPIO control logic off
Q2.Use case :rfEasyLinkTX....tirtos_css Is it more appropriate
But the dormant current must meet the actual requirements

 I
I