Other Parts Discussed in Thread: CC3100, CC3135, CC3100MOD
Hi,
We are trying to port CC3135MOD host driver onto STM32F429 MCU with no rtos and no multi-thread.
We programmed CC3135MOD with sp_4.11.0.0_3.7.0.1_3.1.0.26.bin in SDK version 5.20.00.06.
With SWRU455m Chapter 19 Porting Guide and other threads in E2E Forum, we modified user.h, nortos.c/h files.
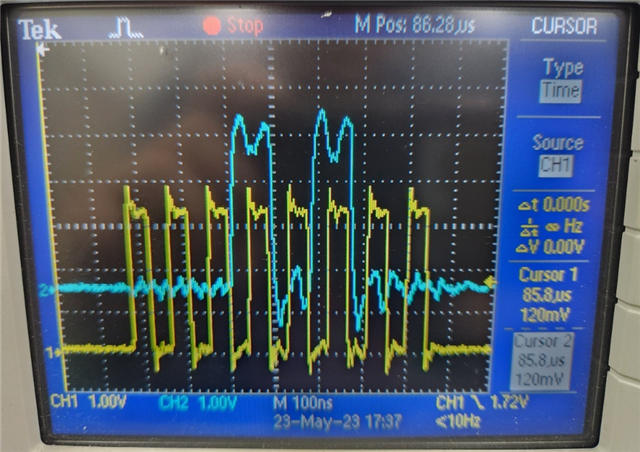
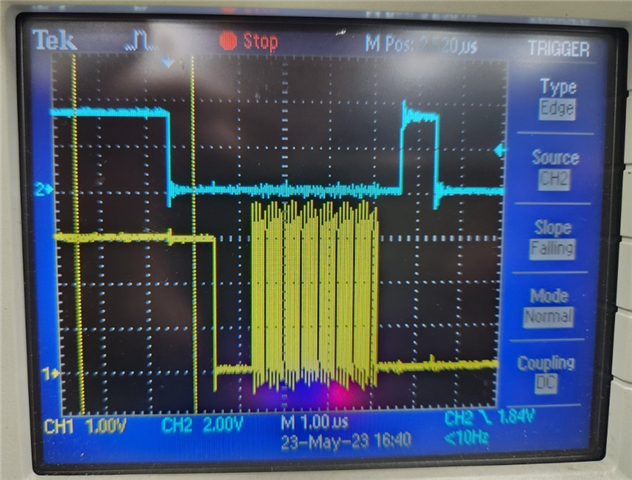
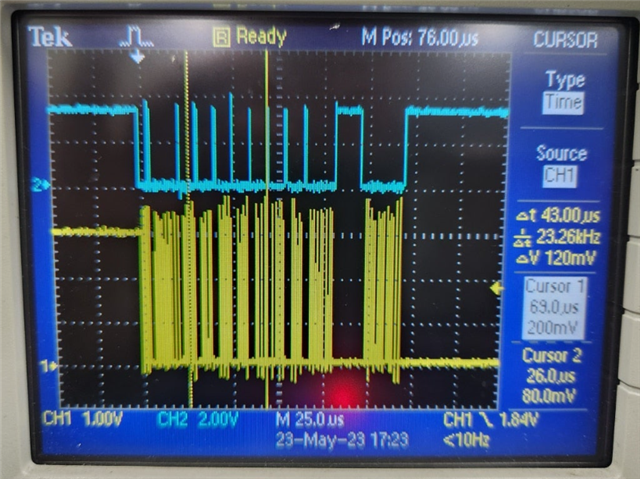
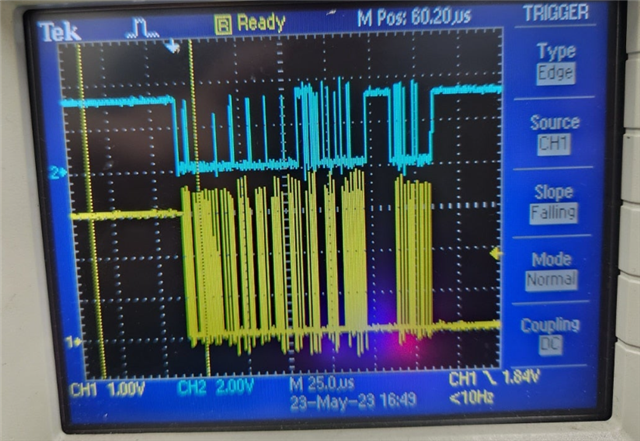
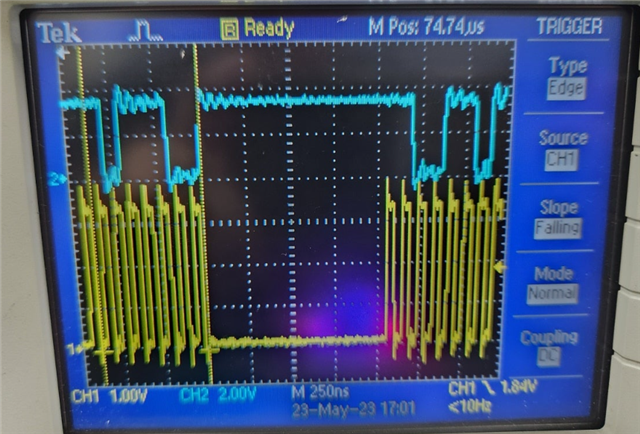
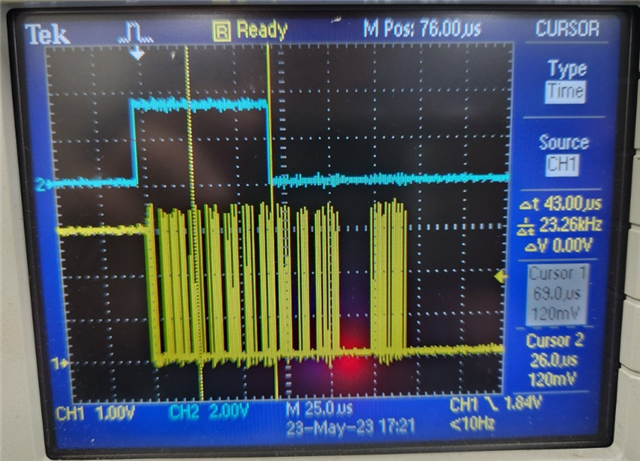
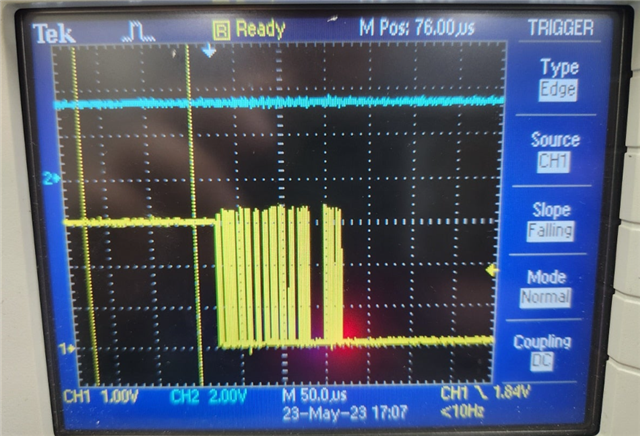
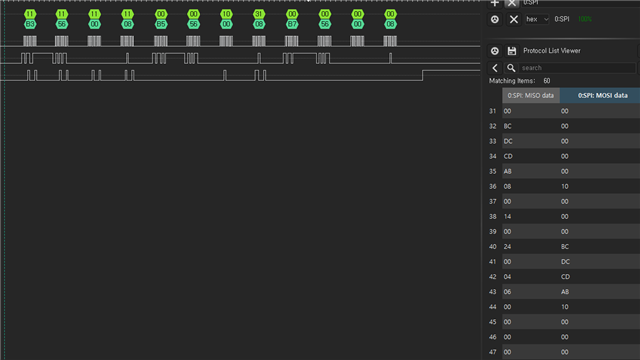
After running the code with sl_Start, we got the followings from SPI lines.
spi_Open
spi_Open done
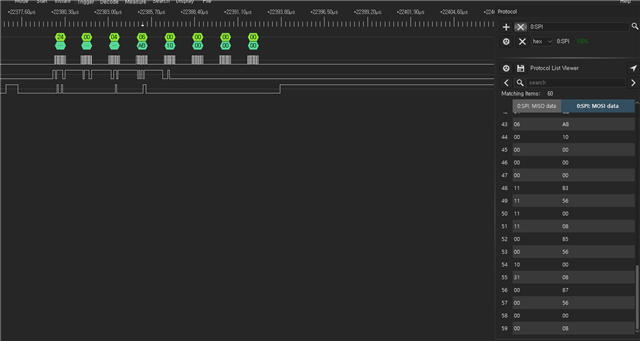
spi_Write 4 65 87 78 56
spi_Read 8 00 00 00 00 00 00 00 00
spi_Read 4 BC DC CD AB
spi_Read 4 08 00 14 00
spi_Read 8 24 00 04 06 00 00 00 00
spi_Read 12 2B 57 00 08 2D 57 00 08 2F 57 00 08
sl_Start Fail -2005
1. are these SPI_Read right response from CC3135MOD?
2. if SPI seems to be working fine, please advise me where to look at to fix this issue?
We are trying to fix these issues for a few weeks, and looking over and over at user manual, porting guide and E2E forum and CC3100 sample code for nortos,
but can not get the clue to fix these issues.
For your review, I attached my user.h, nortos.h and c file.
/*
* nonos.c - CC31xx/CC32xx Host Driver Implementation
*
* Copyright (C) 2017 Texas Instruments Incorporated - http://www.ti.com/
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/*****************************************************************************/
/* Include files */
/*****************************************************************************/
#include <ti/drivers/net/wifi/simplelink.h>
#include <ti/drivers/net/wifi/source/protocol.h>
#include <ti/drivers/net/wifi/source/driver.h>
#ifndef SL_PLATFORM_MULTI_THREADED
#include "nonos.h"
_SlNonOsCB_t g__SlNonOsCB;
_SlNonOsRetVal_t _SlNonOsSpawn(_SlSpawnEntryFunc_t pEntry , void* pValue , _u32 flags)
{
_i8 i = 0;
/* The parameter is currently not in use */
(void)flags;
for (i=0 ; i<NONOS_MAX_SPAWN_ENTRIES ; i++)
{
_SlNonOsSpawnEntry_t* pE = &g__SlNonOsCB.SpawnEntries[i];
if (pE->IsAllocated == FALSE)
{
pE->pValue = pValue;
pE->pEntry = pEntry;
pE->IsAllocated = TRUE;
break;
}
}
return NONOS_RET_OK;
}
_SlNonOsRetVal_t _SlNonOsHandleSpawnTask(void)
{
_i8 i=0;
void* pValue;
for (i=0 ; i<NONOS_MAX_SPAWN_ENTRIES ; i++)
{
_SlNonOsSpawnEntry_t* pE = &g__SlNonOsCB.SpawnEntries[i];
if (pE->IsAllocated == TRUE)
{
_SlSpawnEntryFunc_t pF = pE->pEntry;
pValue = pE->pValue;
/* Clear the entry */
pE->pEntry = NULL;
pE->pValue = NULL;
pE->IsAllocated = FALSE;
/* execute the spawn function */
pF(pValue);
}
}
return NONOS_RET_OK;
}
void tiDriverSpawnCallback(void)
{
/* If we are in cmd context and waiting for its cmd response
* do not handle async events from spawn, as the global lock was already taken when sending the command,
* and the Async event would be handled in read cmd context, so we do nothing.
*/
if (FALSE == g_pCB->WaitForCmdResp)
{
(void)_SlNonOsHandleSpawnTask();
}
}
_SlNonOsRetVal_t _SlNonOsSemGet(_SlNonOsSemObj_t* pSyncObj, _SlNonOsSemObj_t WaitValue, _SlNonOsSemObj_t SetValue, _SlNonOsTime_t Timeout)
{
#if (!defined (SL_TINY)) && (defined(sl_GetTimestamp))
_SlTimeoutParams_t TimeoutInfo={0};
#endif
/* If timeout 0 configured, just detect the value and return */
if ((Timeout ==0) && (WaitValue == *((volatile _u8 *)pSyncObj)) )
{
*pSyncObj = SetValue;
return NONOS_RET_OK;
}
#if (!defined (SL_TINY)) && (defined(sl_GetTimestamp))
if ((Timeout != NONOS_WAIT_FOREVER) && (Timeout != NONOS_NO_WAIT))
{
_SlDrvStartMeasureTimeout(&TimeoutInfo, Timeout);
}
#endif
#ifdef _SlSyncWaitLoopCallback
_SlNonOsTime_t timeOutRequest = Timeout;
#endif
while (Timeout>0)
{
if (WaitValue == *((volatile _u8 *)pSyncObj))
{
*pSyncObj = SetValue;
break;
}
#if (!defined (sl_GetTimestamp)) || (defined (SL_TINY_EXT))
if (Timeout != NONOS_WAIT_FOREVER)
{
Timeout--;
}
#else
if ((Timeout != NONOS_WAIT_FOREVER) && (Timeout != NONOS_NO_WAIT))
{
if (_SlDrvIsTimeoutExpired(&TimeoutInfo))
{
return (_SlNonOsRetVal_t)NONOS_RET_ERR;
}
}
#endif
/* If we are in cmd context and waiting for its cmd response
* do not handle spawn async events as the global lock was already taken */
//if (FALSE == g_pCB->IsCmdRespWaited) //dskim
if (FALSE == g_pCB->WaitForCmdResp)
{
(void)_SlNonOsMainLoopTask();
}
#ifdef _SlSyncWaitLoopCallback
if( (__NON_OS_SYNC_OBJ_SIGNAL_VALUE == WaitValue) && (timeOutRequest != NONOS_NO_WAIT) )
{
if (WaitValue == *((volatile _u8 *)pSyncObj))
{
*pSyncObj = SetValue;
break;
}
_SlSyncWaitLoopCallback();
}
#endif
}
if (0 == Timeout)
{
return NONOS_RET_ERR;
}
else
{
return NONOS_RET_OK;
}
}
_SlNonOsRetVal_t _SlNonOsSemSet(_SlNonOsSemObj_t* pSemObj , _SlNonOsSemObj_t Value)
{
*pSemObj = Value;
return NONOS_RET_OK;
}
_SlNonOsRetVal_t _SlNonOsMainLoopTask(void)
{
_i8 i=0;
void* pValue;
#ifndef SL_TINY_EXT
for (i=0 ; i<NONOS_MAX_SPAWN_ENTRIES ; i++)
#endif
{
_SlNonOsSpawnEntry_t* pE = &g__SlNonOsCB.SpawnEntries[i];
if (pE->IsAllocated == TRUE)
{
_SlSpawnEntryFunc_t pF = pE->pEntry;
pValue = pE->pValue;
/* Clear the entry */
pE->pEntry = NULL;
pE->pValue = NULL;
pE->IsAllocated = FALSE;
/* execute the spawn function */
pF(pValue);
}
}
return NONOS_RET_OK;
}
#endif
Thanks,