Other Parts Discussed in Thread: MMWAVEICBOOST, IWR6843, CC3235S, SYSCONFIG, TIDA-010022
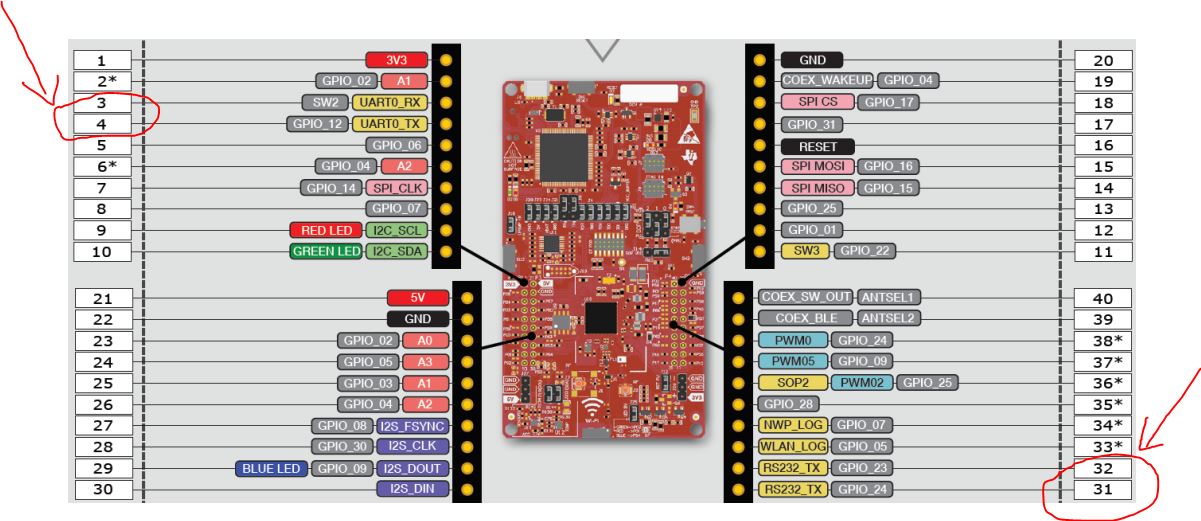
1. In document TIDA-010022 from TI, it mentions 2 UART ports (Data port and CLI port). As I see, MMWAVEICBOOST only uses XDS110 USB port for UART data transfer/image flashing and CC3235 only has UART RX/TX pins on 20-pin header connector. So, which is UART data port and UART CLI port on each module?
2. Previously, I only send configuration to IWR6843 via UART (XDS110 USB port on MMWAVEICBOOST). Why do I need to send Cfg from wifi module according to this document? The Cfg is in PC, so I don't know how CC3235 can send Cfg to IWR6843.
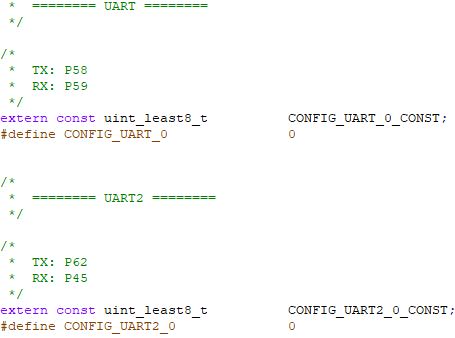
Please show me the position of 2 UART ports as in the photo and how to send Cfg from CC3235 to IWR6843 (why can't I send from PC?)