

この記事は、モーション・コントロール技術記事シリーズの第 3 部です(第 1 部 | 第 2 部)。
モーター・ドライブ・アプリケーションの設計者であれば、これまでにおそらく、モーター制御機能を実装するためにバイポーラ・トランジスタ (BJT) などのディスクリート部品を複数使用したことがあるでしょう。このアプローチは通常は比較的安価ですが、全体の部品点数と基板面積が増加し、設計期間の長期化と設計の複雑化も招く可能性があります。複数の部品を使用すると、システムの信頼性に影響を及ぼすおそれもあります。
アプリケーションの複雑化、大電力化、小型化が進むにつれて、統合が不可欠になります。統合型ソリューションを採用すると、設計期間の短縮や、調達の複雑さの低減、コスト削減と同時に、モーター・システムの信頼性と効率を確保できます。
この記事では、ディスクリートからフル統合型のオプションまで、モーター制御のいくつかの実装を比較します。それにより、開発中の設計に適したアプローチを見つけやすくなります。表 1 に、各モーター制御オプションの統合レベルの比較を示します。
|
|
制御 |
ドライバ |
FET |
|
ディスクリート BJT |
|
|
|
|
ゲート・ドライバ IC |
|
X |
|
|
モーター・ドライバ IC |
|
X |
X |
|
制御機能とゲート・ドライバを統合した IC |
X |
X |
|
|
制御機能、ゲート・ドライバ、電界効果トランジスタ (FET) を統合した IC |
X |
X |
X |
表 1:モーターを駆動するための統合のレベル
モーター制御向けのディスクリート・アプローチ
図 1 には、マイコンなどの制御ユニットを示しています。マイコンは、モーターのステータスに関するフィードバックを処理し、モーターのトルク、位置、速度を制御するための信号を送信します。ゲート・ドライバはマイコンの信号を増幅し、モーター・ドライブ用金属酸化膜半導体電界効果トランジスタ (MOSFET) を駆動します。

図 1:モーター制御の基本的なブロック図
図 2 に示すように、BJT トーテム・ポール / プッシュプル回路をゲート・ドライブ回路として使用し、単一の MOSFET を駆動することもできます。BJT トーテム・ポール回路は安価で実装が容易ですが、部品点数が多く、大きなボード面積を占有します。加えて、1 個のモーターを駆動するために複数の MOSFET が必要なため、このディスクリート回路を何個も実装する必要が生じ、必要な部品点数とボード面積もその分だけ増加します。
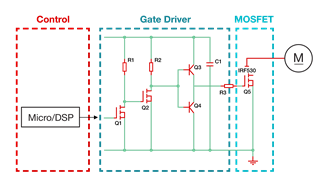
図2:ディスクリートの BJT トーテム・ポール / プッシュプル回路を使用したゲート・ドライバ・ブロックの実装
最初の統合オプション:ゲート・ドライバ IC
基本的なゲート・ドライバ IC は、トーテム・ポールの機能を単一パッケージに統合しています。プロセス技術に関する最近の革新により、ゲート・ドライバ IC は、ディスクリート・ベースの BJT と同程度まで低コスト化が進みました。
ゲート・ドライバ IC を選択する際には、図 3 に示すように、チャネル数や、モーターの電力レベルに最も適した電圧と電流の能力など、いくつかの検討事項があります。
統合型ゲート・ドライバ IC の選択肢:
- 1 チャネルのゲート・ドライバ (TI の UCC21732 など) は、一般的に AC モーターで採用され、IGBT (絶縁型ゲート・バイポーラ・トランジスタ) や SiC (シリコン・カーバイド) など、高電圧 (700V 超) のハイサイド・パワー・スイッチとローサイド・パワー・スイッチを駆動します。
- 2 チャネルのハーフブリッジ・ゲート・ドライバ (UCC27712 など) は、100 ~ 700V のモーター向けであり、IGBT と MOSFET を駆動します。
- 4 チャネルの H ブリッジ・ドライバや 6 チャネルの 3 相モーター・ゲート・ドライバ (DRV8329 など) は、比較的電圧の低い (60V 未満) DC モーター向けに設計されています。
ゲート・ドライバを採用すると、モーターの電力レベルが変化した場合でも、以前の設計をそのまま維持し、電圧と電流の新しいレベルに対応できるように外部 FET を差し替えるだけで済みます。

図3:外部 FET を駆動するゲート・ドライバ IC の種類
ゲート・ドライバは、低電圧ロックアウトや、クロス導通を防止するためのインターロック保護のような基本的な機能から、スルーレート制御やデッドタイムの自動調整に対応するスマート・ゲート・ドライバのような高度な機能まで、さまざまな機能を備えています。これらのゲート・ドライバの詳細については、アプリケーション・ノート『スマート・ゲート・ドライブについて』をご覧ください。
従来は、スルーレートを設定するために複数の外部部品を使用していました。これには、MOSFET のゲートに流れる電流を制限するソース (供給) 抵抗とシンク (吸い込み) 抵抗を合計 2 個、立ち上がりと立ち下がりのレートを個別に調整する 1 個のダイオード、および 1 個のプルダウン抵抗が含まれます。スマート・ゲート・ドライブを使用すると、これらの部品が不要になり、同時に、SPI (シリアル・ペリフェラル・インターフェイス) を使用してスルーレートを調整するフレキシビリティを確保することができます。
6 チャネル・ドライバをスマート・ゲート・ドライブと組み合わせて使用すると、最大 24 個のディスクリート部品が不要になり、ボード面積と部品表 (BOM) 点数を節減できます。ゲート・ドライバには他にも、電流センシング、過電流と過熱の保護、故障検出、さらには絶縁といった、保護機能や診断機能を統合することで、部品点数をさらに低減できます。
2 番目の統合オプション:モーター・ドライバ IC
図 4 に示すように、モーター・ドライバ IC は、1 個のゲート・ドライバと複数の内蔵 FET を統合しています。これは低消費電力 (70W 未満) のモーター・システムにとって良好な選択肢です。モーター・ドライバ IC は、ゲート・ドライバよりもフットプリントが小さく、FET 電力段を統合しているため、設計の回路図とレイアウトを簡素化できます。ゲート・ドライバ IC と同様、DRV8962 のようなモーター・ドライバ IC も保護機能と診断機能を搭載しています。
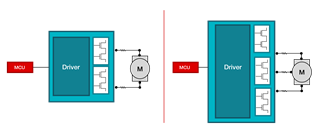
図 4:FET を内蔵した H ブリッジおよび 3 相モーター・ドライバ
モーター・ドライブ・ソリューションを選択する際には、内部 FET のオン抵抗 RDS(ON) や、ピーク電流と実効 (RMS) 電流を考慮する必要があります。また、内部 FET の消費電力に関して、放熱計算も実行する必要があります。
3 番目の統合オプション:制御機能とゲート・ドライバを統合した IC
これまでに登場した 2 つのオプションと異なり、MCT8329A など、制御機能とゲート・ドライバを統合した ICは、モーター制御向けのマイコンを必要としません。図 5 に示すように、これらの IC には、前の選択肢と同様、保護機能と内蔵機能を搭載したゲート・ドライバの機能がありますが、それに加えて、マイコンによる支援なしで動作できる制御アルゴリズムを搭載しています。
台形波、正弦波、フィールド・オリエンテッド・コントロール (FOC:磁界方向制御) のいずれであっても、モーター整流アルゴリズムの実装は複雑になる可能性があります。制御機能とゲート・ドライバを統合した IC は、プログラミング不要のソリューションの実現に役立ち、整流アルゴリズムを内部で処理することができます。その結果、設計期間の短縮や、コーディング、デバッグ、テストを全部実施する場合に比べて作業の簡素化が可能になります。
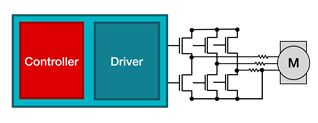
図 5:制御機能を統合した 3 相ゲート・ドライバ
また、制御機能とゲート・ドライバを統合した IC は、センサ付き制御またはセンサレス制御のどちらであっても、モーター整流のフレキシブルな実装を可能にします。センサ付きアプローチを採用する場合、回転子の位置を検出するために外部ホール効果センサを使用できます。これらの IC はホール効果センサの入力を受け取り、モーター制御アルゴリズムを活用して、効率的に低騒音でモーターを駆動します。対照的に、センサレス実装は外部ホール効果センサを除外し、ボード面積と BOM の削減に役立ちます。センサレス形式で、制御機能とゲート・ドライバを統合した IC では、内蔵の電流センシング機能を使用して逆起電力 (BEMF) 電圧を測定し、モーターの位置を内部で計算します。
4 番目の統合オプション:制御機能、ゲート・ドライバ、FET を統合した IC
図 6 に示す最後の統合型オプションは、多くの場合、「フル統合型」と呼ばれています。MCF8315A のように、制御機能、ゲート・ドライバ、FET を統合した IC はボードの専有面積が最小であり、BOM 点数も最小で済みます。プログラミング不要の制御機能、保護機能と診断機能を搭載したドライバ、複数の FET、これらすべてをシングルチップに統合しているからです。モーター・ドライバ IC オプションと同様に、制御機能、ゲート・ドライバ、FET を統合した IC ソリューションは、内部 FET の能力による制限を受けます。そのため、電流と放熱に関する計算は必須です。
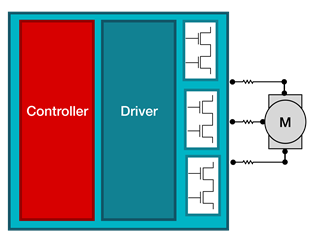
図 6:フル統合型 – モーター制御機能、ドライバ、および複数の FET
まとめ
統合レベルが多様に異なるこれらの IC は、モーターの複数の電力レベル要件に対応できるほか、設計期間の短縮、コストの削減、複雑さの軽減にも役立ちます。また、統合型デバイスは、家電製品の可聴ノイズや、ファクトリ・オートメーションとロボットの高精度制御などの課題への対処にも役立ちます。