Other Parts Discussed in Thread: INA351, REF2033, TLV7022,
Hello All,
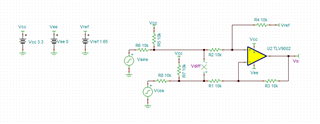
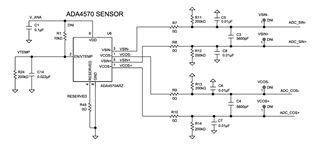
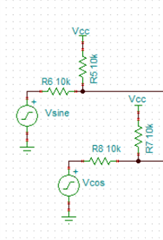
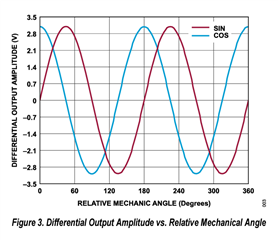
We need urgent guidance on converting differential Sine & Cosine signals of the ADA4570 AMR Speed sensor into Single-ended 0-3.3V input for ADC.
- What is their gain requirements? 1 or 0.9
- What is their input/output voltage range? Bipolar 3.3V Signal
- What is their power supply requirements? Single-ended 3.3V or 5V
- What will the load be at the output of the amplifier? ADC
- Are there any distortion or noise minimum requirements? Least noise for cos sensitive application
We have selected INA351 with internal Vref Buffer for its low cost, kindly suggest any alternatives or more integrated solutions for this with some reference design.
Thanks in advance, Regards.