Part Number: VCA810
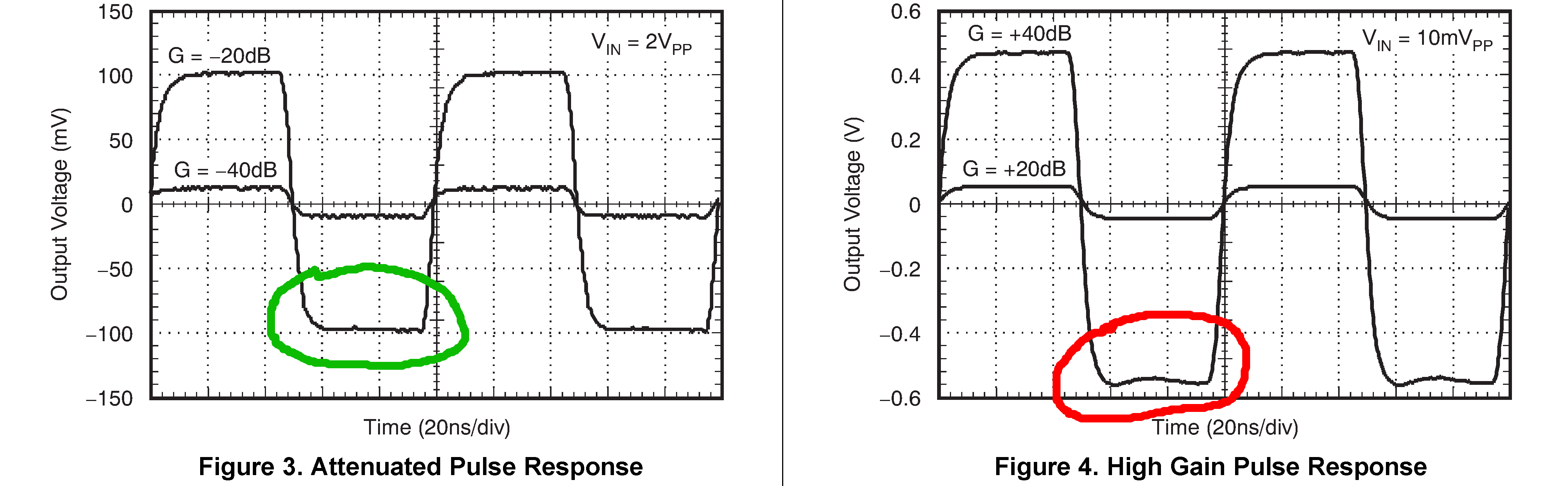
Hello, I have an application where I need to use a VGA but I also need to get a monotonic step response. With "monotonic" I mean that I need first-order responses and avoid overshoots, especially for the falling edge of the input signal. Take for example the VCA810 - which is the best one I've found so far - and look at datasheet's figures 3 and 4 (see image below). For small gains the response is first-order (green circle) but for large gains the response becomes of higher order (red circle). I've noticed that all of the VGAs apparently have this "issue".
My questions are therefore two:
- Why does this happen? Why apparently it happens only for the falling edge? Is it intrinsic of the VGA architecture?
- How can I avoid/improve this?
I cannot place a preamplifier before the VGA (and then use smaller gains) because I need to support a very wide input signal range. A possible idea could be to "invert" the input signal so that the falling edges become rising edges, and then invert the signal again after the VGA. But this is a sub-obtimal solution, because I need a clean response also for the rising edges (even if it's less critical).
Any idea is much appreciated.
Thank you!
L.