



Tool/software:
Hi,
Im tring to get the ads1298 upp and running. But have some issues.
Followed the setup sequence "see code" after setup I'm sending the SDATAC and STOP command one after each other to be able to read back registers.
Main issue is tha i cant send the first command over the SDATAC, it is not recognised by the ADS, the SPI line is upp high and ignors the first data send and becouse of this i have to send a dumy data to get it started, any idea on this??
Im also using the START pin to control it, but it has no effect when I pull it low and start to read the register values.
void ads1298r_ctrl_init_device(void) {
// Disable data interrupts for the ADS converter
HAL_NVIC_DisableIRQ(EXTI1_IRQn);
SPI_ADS_START_ON_OFF(0);
DELAY_MS(1);
// Initialise ADS using RESET PIN
ads1298r_reset_pin();
// Reset sequence is finished
}
//-- Configure the ADS through SPI
void ads1298r_init(void) {
// Enabling the ADS modules
SPI_ADS_COM_ON_OFF(0);
// Stopping the ADS sensor
SPI_ADS_START_ON_OFF(0);
DELAY_MS(1);
// Send dumy data to be able to continue with the configuration
ads_read_reg(0x00);
// STOP all data transmission for configuration
ads1298r_SDATAC();
ads1298r_STOP();
DELAY_MS(1);
// Sending out configuration data to the ECG sensors
init_ads1298r_EPMCG_experiment_LOFF();
// Initialise Data reception form the ADS
// First it need to be started this function includes a command and also a START pin set to LOW
ads1298r_RDATAC();
ads1298r_START();
DELAY_MS(100);
// Re Enable the interrupts to have a breathing time for DMA
HAL_NVIC_EnableIRQ(EXTI1_IRQn);
}
/*
* New configuration file for the ECG ADS sensors
*/
void init_ads1298r_EPMCG_experiment_LOFF(void){
uint8_t buffer[3];
// Enable ECG and PMCG at the Same time
// SPI_ADS_COM_ON_OFF(1);
// REG CONFIG 1
//Set Data Rate 4kHz with DEFAULT LOW-POWER mode
// ads1298r_SetDataRate(ADS129X_SAMPLERATE_4k_64);
// REGS - 0b0xxx xxxx - LP mode
// REGS - 0bx1xx xxxx - Multiple readback mode
// REGS - 0bxx0x xxxx - Oscillator clock output disabled
// REGS - 0bxxxx x010 - Set data ready to 4kSPS
// REGS Final - 0b0100 0010
ADS_Transmit(ADS129X_REG_CONFIG1, 0x00, 0b01000010);
// REG CONFIG 3
// Enable internal reference buffer - 0_1xxxxxxx
// SET Internal RLD signals - 0_xxxx1xxx
// RLD buffer ENABLE - 0_xxxxx1xx
// REG - 0x10001100
ADS_Transmit(ADS129X_REG_CONFIG3, 0x73, ADS129X_PD_REF_ENABLED | ADS129X_RLD_REF_SIG_INTERNAL | ADS129X_RLD_BUFFER_ENABLED);
// ADS_Transmit(ADS129X_REG_CONFIG3, 0x7F, ADS129X_PD_REF_ENABLED);
// ADS_Transmit(ADS129X_REG_CONFIG3, 0xF7, ADS129X_RLD_REF_SIG_INTERNAL);
// ADS_Transmit(ADS129X_REG_CONFIG3, 0xFB, ADS129X_RLD_BUFFER_ENABLED);
// ALL GAIN and Electrode MODE set to 0x00
// Setup channels of the ECG ADS
// Easier if channels are set up using simple SPI transfer to ADS
// Currently it checks the state of the register then writes in the changes
ADS_Transmit(ADS129X_REG_CH1SET, 0xF8, ADS129X_MUX_NORMAL);
ADS_Transmit(ADS129X_REG_CH2SET, 0xF8, ADS129X_MUX_NORMAL);
ADS_Transmit(ADS129X_REG_CH3SET, 0xF8, ADS129X_MUX_NORMAL);
ADS_Transmit(ADS129X_REG_CH4SET, 0xF8, ADS129X_MUX_NORMAL);
ADS_Transmit(ADS129X_REG_CH5SET, 0xF8, ADS129X_MUX_NORMAL);
ADS_Transmit(ADS129X_REG_CH6SET, 0xF8, ADS129X_MUX_NORMAL);
ADS_Transmit(ADS129X_REG_CH7SET, 0xF8, ADS129X_MUX_NORMAL);
ADS_Transmit(ADS129X_REG_CH8SET, 0xF8, ADS129X_MUX_NORMAL);
// Channel gain settings each channel has to be written separately
// Gain set to GAIN_6
ADS_Transmit(ADS129X_REG_CH1SET, 0x00, ADS129X_GAIN_6X);
ADS_Transmit(ADS129X_REG_CH2SET, 0x00, ADS129X_GAIN_6X);
ADS_Transmit(ADS129X_REG_CH3SET, 0x00, ADS129X_GAIN_6X);
ADS_Transmit(ADS129X_REG_CH4SET, 0x00, ADS129X_GAIN_6X);
ADS_Transmit(ADS129X_REG_CH5SET, 0x00, ADS129X_GAIN_6X);
ADS_Transmit(ADS129X_REG_CH6SET, 0x00, ADS129X_GAIN_6X);
ADS_Transmit(ADS129X_REG_CH7SET, 0x00, ADS129X_GAIN_6X);
ADS_Transmit(ADS129X_REG_CH8SET, 0x00, ADS129X_GAIN_6X);
// Setup reference voltage to REF_2_4_V
// Config REG - 0_xx0xxxxx
ADS_Transmit(ADS129X_REG_CONFIG3, 0xDF, ADS129X_REF_VOLTAGE_2_4V);
// RLD_SENSP
// ch2 and ch3 set - 0x00000110
// Note channels are counted from the right side - 0x87654321
ADS_WREG(ADS129X_REG_RLD_SENSP, 0x00000110);
// RLD_SENSN
// ch2 set - 0x00000010 - NOT USED
// 0x00000000 - Currently Used
// Note channels are counted from the right side - 0x87654321
ADS_WREG(ADS129X_REG_RLD_SENSN, 0x00000000);
// WCT1
// bit3 PD_WCTS = 1 poweron
// WCTA 011, channel2 negative
//WCT settings
ADS_Transmit(ADS129X_REG_CONFIG3, 0xFB, ADS129X_WCTA_STAT_POWERED_DOWN);
ADS_Transmit(ADS129X_REG_WCT1, 0xF8, ADS129X_WCTAC_AMP_CH2_N);
// WCT2
// PD_WCTC = 1 powered on
// PD_WCTB = 1 powered on
// WCTB 010
// WCTC 100
//WCT connection settings
ADS_Transmit(ADS129X_REG_WCT2, 0xBF, ADS129X_WCTB_STAT_POWERED_ON);
ADS_Transmit(ADS129X_REG_WCT2, 0xC7, ADS129X_WCTB_AMP_CH2_P);
ADS_Transmit(ADS129X_REG_WCT2, 0x7F, ADS129X_WCTC_STAT_POWERED_ON);
ADS_Transmit(ADS129X_REG_WCT2, 0xF8, ADS129X_WCTAC_AMP_CH3_P);
// Lead off detection settings /--------------------------------/
// Simple trasfer is used to write to the ADS
// other way errors didnt let the transfer to compleate lossing the settings
// Register setup: 111 _ 1 _ 00 _ 11
// 111 - Positive sied 70% , negative side 30%
// 1 - pullup or pulldown resistor mode lead-of
// 00 - current magnitude 6nA
// 11 - DC lead-off detection turned on
// Enable the lead off settings
ADS_WREG(ADS129X_REG_LOFF, 0b11100011);
// Turn on the lead off comparator
// 0bxxxxxx1x - Lead-off comparators enabled
//Configure the register to handle the lead off settings
ADS_WREG(ADS129X_REG_CONFIG4, 0b00000010);
// Which channels to turn on the Lead off SENSP and SENSN
// Enable all LOFF channels for SENSP
// Write in enable and disable to LOFF channels
ADS_WREG(ADS129X_REG_LOFF_SENSP, 0b11111111);
// Enable all LOFF channels for SENSN
// Write in enable and disable to LOFF channels
ADS_WREG(ADS129X_REG_LOFF_SENSN, 0b11111111);
// SPI_ADS_COM_ON_OFF(0);
// delayUs(20);
//Task_sleep(1);
}
// Function to start the data transfer
//void task_ads1298r_stop(void) {
//while(true) {
//Semaphore_pend(ads1298r_start_sem_handle, BIOS_WAIT_FOREVER);
// ads1298r_stop();
//}
//}
void ads1298r_RDATAC(void)
{
// START continuous read on the ADS converter
// Setup command for START sequence
SPI_ADS_START_ON_OFF(0);
DELAY_MS(1);
// 0x10 - Data to be sent to STOP the continuouse conversion
ads_write_command(ADS129X_CMD_RDATAC);
DELAY_MS(1);
// pull up the START pin
SPI_ADS_START_ON_OFF(1);
DELAY_MS(1);
}
/*
* ======== Stop ========
* Stop the ADS1298r device.
*/
void ads1298r_SDATAC(void)
{
// STOP continuous read on the ADS converter
// Setup command for STOP sequence
SPI_ADS_START_ON_OFF(1);
DELAY_MS(1);
// 0x11 - Data to be sent to STOP the continuouse conversion
ads_write_command(ADS129X_CMD_SDATAC);
DELAY_MS(1);
// Pull up the START pin
SPI_ADS_START_ON_OFF(0);
DELAY_MS(1);
}
void ads1298r_START(void)
{
// START continuous read on the ADS converter
// Setup command for START sequence
SPI_ADS_START_ON_OFF(0);
DELAY_MS(1);
// 0x00 - Data to be sent to STOP the continuouse conversion
ads_write_command(ADS129X_CMD_START);
DELAY_MS(1);
// pull up the START pin
SPI_ADS_START_ON_OFF(1);
DELAY_MS(1);
}
void ads1298r_STOP(void)
{
// STOP continuous read on the ADS converter
// Setup command for STOP sequence
SPI_ADS_START_ON_OFF(0);
DELAY_MS(1);
SPI_ADS_START_ON_OFF(1);
DELAY_MS(1);
// 0x00 - Data to be sent to STOP the continuouse conversion
ads_write_command(ADS129X_CMD_STOP);
DELAY_MS(1);
// pull up the START pin
SPI_ADS_START_ON_OFF(0);
DELAY_MS(1);
}
/*
* ======== Reset ========
* Reset the ADS1298r device.
*/
void ads1298r_reset_pin(void)
{
SPI_ADS_RST_OFF_ON(1);
DELAY_MS(200);
// Perform a ADS reset sequence Pull RESET pin LOW
SPI_ADS_RST_OFF_ON(0);
DELAY_MS(10);
SPI_ADS_RST_OFF_ON(1);
DELAY_MS(100);
}
void ads1298r_reset_command(void)
{
// Setup command for RESET sequence
// 0x06 - Data to be sent to RESET the continuouse conversion
ads_write_command(ADS129X_CMD_RESET);
// ADS_WREG(_address, 0x00);
HAL_Delay(10);
}
uint8_t ads1298r_read_ID(void)
{
// 0x00 - Read Reg ID, If cant read continue
uint8_t timeout = 10;
while (timeout--){
uint8_t reg_data = ads_read_reg(ADS129X_REG_ID);
DELAY_MS(1);
if(reg_data == 0x92)
return 1;
}
}
//-- Configure the ADS through SPI - ...
void task_ads1298r_start(void){
// Start the Data reception from the ADS
// ads1298r_start();
HAL_Delay(1);
// Enable interrupts on the ADS DRDY PIN
// HAL_NVIC_EnableIRQ(EXTI2_IRQn);
HAL_Delay(4);
}
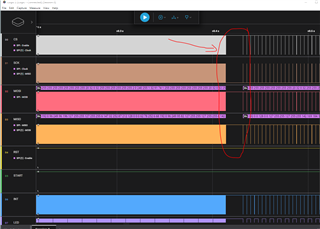
NOTE: code got updated
Logic analyzer picture, missing the 0x00 red-back, but afterwards the read-back starts as the analyzer shows the correct values being received by the mcu.
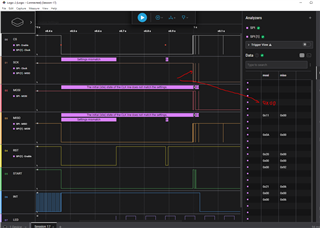
1, Any idea why this happens, am I missing something in the initialization phase ?
2, I there any example code which shows the proper initialisation sequence?
3, why does the 4k sampling rate changes back to 250Hz ?
