Part Number: TCAN1164-Q1
Hi expert,
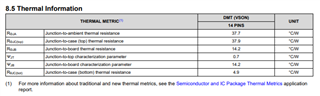
My customer is requesting the data of the transient thermal impedance for TCAN1164.
Do you have any data for the transient thermal impedance?
Generally, the transient thermal impedance is for FET device, power device or something,
But, if you have any data or comment, please let me know.
Thanks,
Mukuno