Part Number: TCAN4550-Q1
Other Parts Discussed in Thread: AWRL1432, TCAN4550
Hi all,
I am working on implementing SPI-to-CAN-FD on a mmWave radar SoC (AWRL1432) using the TCAN4550-Q1 for automotive applications.
So far, we've implemented the functions in TCAN4x5x_SPI and verified that it can read/write to the TCAN4550 registers over SPI.
However, when I try transmitting output over CAN-FD using the reference code provided in the TCAN4550_DEMO, no data is being sent; only the ID, ctrl, and CRC can be seen, followed by no acknowledgement.
Please see the waveform for a transmit below:
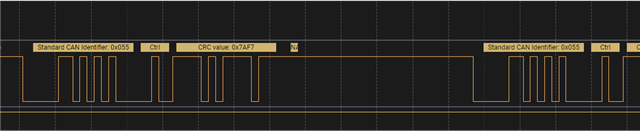
Testing on PCAN-Pro also shows similar: while transmits are registered, only ID is shown and data is shown to be 0.
Please see the TCAN4550_Initialization in the code below:
void TCAN4550_Initialize(void)
{
TCAN4x5x_Device_ClearSPIERR(); // Clear any SPI ERR flags that might be set as a result of our pin mux changing during MCU startup
TCAN4x5x_Device_EnableTestMode(TCAN4x5x_DEVICE_TEST_MODE_CONTROLLER);
int32_t debugVal = AHB_READ_32(REG_DEV_MODES_AND_PINS);
// Step one attempt to clear all interrupts
TCAN4x5x_Device_Interrupt_Enable dev_ie = {0}; // Initialize to 0 to all bits are set to 0.
TCAN4x5x_Device_ConfigureInterruptEnable(&dev_ie); // Disable all non-MCAN related interrupts for simplicity
TCAN4x5x_Device_Interrupts dev_ir = {0}; // Setup a new MCAN IR object for easy interrupt checking
TCAN4x5x_Device_ReadInterrupts(&dev_ir); // Request that the struct be updated with current DEVICE (not MCAN) interrupt values
if (dev_ir.PWRON) // If the Power On interrupt flag is set
TCAN4x5x_Device_ClearInterrupts(&dev_ir); // Clear it because if it's not cleared within ~4 minutes, it goes to sleep
// Configure the CAN bus speeds
TCAN4x5x_MCAN_Nominal_Timing_Simple TCANNomTiming = {0}; // 500k arbitration with a 40 MHz crystal ((40E6 / 2) / (32 + 8) = 500E3)
TCANNomTiming.NominalBitRatePrescaler = 2;
TCANNomTiming.NominalTqBeforeSamplePoint = 32;
TCANNomTiming.NominalTqAfterSamplePoint = 8;
TCAN4x5x_MCAN_Data_Timing_Simple TCANDataTiming = {0}; // 2 Mbps CAN FD with a 40 MHz crystal (40E6 / (15 + 5) = 2E6)
TCANDataTiming.DataBitRatePrescaler = 1;
TCANDataTiming.DataTqBeforeSamplePoint = 15;
TCANDataTiming.DataTqAfterSamplePoint = 5;
TCAN4x5x_MCAN_CCCR_Config cccrConfig = {0}; // Remember to initialize to 0, or you'll get random garbage!
if(frameType == CANFDLLD_MCANFrameType_FD)
{
cccrConfig.FDOE = 1; // Enable CAN FD mode
cccrConfig.BRSE = 1; // CAN FD Bit rate switch enable
}
else
{
cccrConfig.FDOE = 0; // Enable CAN mode
cccrConfig.BRSE = 0; // CAN FD Bit rate switch disable
}
//cccrConfig.DAR = 1; // Disable automatic transmission
/* Configure the default CAN packet filtering settings */
TCAN4x5x_MCAN_Global_Filter_Configuration gfc = {0};
gfc.RRFE = 1; // Reject remote frames (TCAN4x5x doesn't support this)
gfc.RRFS = 1; // Reject remote frames (TCAN4x5x doesn't support this)
gfc.ANFE = TCAN4x5x_GFC_ACCEPT_INTO_RXFIFO0; // Default behavior if incoming message doesn't match a filter is to accept into RXFIO0 for extended ID messages (29 bit IDs)
gfc.ANFS = TCAN4x5x_GFC_ACCEPT_INTO_RXFIFO0; // Default behavior if incoming message doesn't match a filter is to accept into RXFIO0 for standard ID messages (11 bit IDs)
/* ************************************************************************
* In the next configuration block, we will set the MCAN core up to have:
* - 1 SID filter element
* - 1 XID Filter element
* - 5 RX FIFO 0 elements
* - RX FIFO 0 supports data payloads up to 64 bytes
* - RX FIFO 1 and RX Buffer will not have any elements, but we still set their data payload sizes, even though it's not required
* - No TX Event FIFOs
* - 2 Transmit buffers supporting up to 64 bytes of data payload
*/
TCAN4x5x_MRAM_Config MRAMConfiguration = {0};
MRAMConfiguration.SIDNumElements = 1; // Standard ID number of elements
MRAMConfiguration.XIDNumElements = 1; // Extended ID number of elements
MRAMConfiguration.Rx0NumElements = 5; // RX0 Number of elements
MRAMConfiguration.Rx0ElementSize = MRAM_64_Byte_Data; // RX0 data payload size (Use the defines)
MRAMConfiguration.Rx1NumElements = 0; // RX1 number of elements
MRAMConfiguration.Rx1ElementSize = MRAM_64_Byte_Data; // RX1 data payload size (use the defines)
MRAMConfiguration.RxBufNumElements = 0; // RX buffer number of elements
MRAMConfiguration.RxBufElementSize = MRAM_64_Byte_Data; // RX buffer data payload size (use the defines)
MRAMConfiguration.TxEventFIFONumElements = 0; // TX Event FIFO number of elements
MRAMConfiguration.TxBufferNumElements = 2; // TX buffer number of elements
MRAMConfiguration.TxBufferElementSize = MRAM_64_Byte_Data; // TX buffer data payload size (use the defines)
// Configure the MCAN core with the settings above, these changes in this block all are protected write registers, so we just knock them out at once
TCAN4x5x_MCAN_EnableProtectedRegisters(); // Start by making protected registers accessible
TCAN4x5x_MCAN_ConfigureCCCRRegister(&cccrConfig); // Enable FD mode and Bit rate switching
TCAN4x5x_MCAN_ConfigureNominalTiming_Simple(&TCANNomTiming);// Setup nominal/arbitration bit timing
TCAN4x5x_MCAN_ConfigureDataTiming_Simple(&TCANDataTiming); // Setup CAN FD timing
TCAN4x5x_MRAM_Clear(); // Clear all of MRAM (Writes 0's to all of it)
TCAN4x5x_MRAM_Configure(&MRAMConfiguration); // Set up the applicable registers related to MRAM configuration
TCAN4x5x_MCAN_DisableProtectedRegisters(); // Disable protected write and take device out of INIT mode
// Set the interrupts we want to enable for MCAN
TCAN4x5x_MCAN_Interrupt_Enable mcan_ie = {0}; // Remember to initialize to 0, or you'll get random garbage!
mcan_ie.RF0NE = 1; // RX FIFO 0 new message interrupt enable
TCAN4x5x_MCAN_ConfigureInterruptEnable(&mcan_ie); // Enable the appropriate registers
// Setup filters, this filter will mark any message with ID 0x055 as a priority message
TCAN4x5x_MCAN_SID_Filter SID_ID = {0};
SID_ID.SFT = TCAN4x5x_SID_SFT_CLASSIC; // SFT: Standard filter type. Configured as a classic filter
SID_ID.SFEC = TCAN4x5x_SID_SFEC_PRIORITYSTORERX0; // Standard filter element configuration, store it in RX fifo 0 as a priority message
SID_ID.SFID1 = 0x055; // SFID1 (Classic mode Filter)
SID_ID.SFID2 = 0x7FF; // SFID2 (Classic mode Mask)
TCAN4x5x_MCAN_WriteSIDFilter(0, &SID_ID); // Write to the MRAM
// Store ID 0x12345678 as a priority message
TCAN4x5x_MCAN_XID_Filter XID_ID = {0};
XID_ID.EFT = TCAN4x5x_XID_EFT_CLASSIC; // EFT
XID_ID.EFEC = TCAN4x5x_XID_EFEC_PRIORITYSTORERX0; // EFEC
XID_ID.EFID1 = 0x12345678; // EFID1 (Classic mode filter)
XID_ID.EFID2 = 0x1FFFFFFF; // EFID2 (Classic mode mask)
TCAN4x5x_MCAN_WriteXIDFilter(0, &XID_ID); // Write to the MRAM
/* Configure the TCAN4550 Non-CAN-related functions */
TCAN4x5x_DEV_CONFIG devConfig = {0}; // Remember to initialize to 0, or you'll get random garbage!
devConfig.SWE_DIS = 0; // Keep Sleep Wake Error Enabled (it's a disable bit, not an enable)
devConfig.DEVICE_RESET = 0; // Not requesting a software reset
devConfig.WD_EN = 0; // Watchdog disabled
devConfig.nWKRQ_CONFIG = 0; // Mirror INH function (default)
devConfig.INH_DIS = 0; // INH enabled (default)
devConfig.GPIO1_GPO_CONFIG = TCAN4x5x_DEV_CONFIG_GPO1_MCAN_INT1; // MCAN nINT 1 (default)
devConfig.FAIL_SAFE_EN = 0; // Failsafe disabled (default)
devConfig.GPIO1_CONFIG = TCAN4x5x_DEV_CONFIG_GPIO1_CONFIG_GPO; // GPIO set as GPO (Default)
devConfig.WD_ACTION = TCAN4x5x_DEV_CONFIG_WDT_ACTION_nINT; // Watchdog set an interrupt (default)
devConfig.WD_BIT_RESET = 0; // Don't reset the watchdog
devConfig.nWKRQ_VOLTAGE = 0; // Set nWKRQ to internal voltage rail (default)
devConfig.GPO2_CONFIG = TCAN4x5x_DEV_CONFIG_GPO2_NO_ACTION; // GPO2 has no behavior (default)
devConfig.CLK_REF = 1; // Input crystal is a 40 MHz crystal (default)
devConfig.WAKE_CONFIG = TCAN4x5x_DEV_CONFIG_WAKE_BOTH_EDGES;// Wake pin can be triggered by either edge (default)
TCAN4x5x_Device_Configure(&devConfig); // Configure the device with the above configuration
TCAN4x5x_Device_SetMode(TCAN4x5x_DEVICE_MODE_NORMAL); // Set to normal mode, since configuration is done. This line turns on the transceiver
TCAN4x5x_MCAN_ClearInterruptsAll(); // Resets all MCAN interrupts (does NOT include any SPIERR interrupts)
}
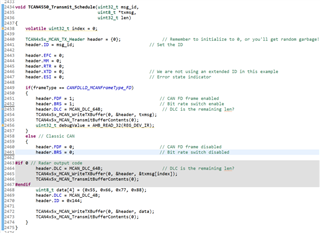
Please see how I am sending a CAN-FD message below:
void TCAN4550_Transmit_Schedule(uint32_t msg_id,
uint8_t *txmsg,
uint32_t len)
{
volatile uint32_t index = 0;
TCAN4x5x_MCAN_TX_Header header = {0}; // Remember to initialize to 0, or you'll get random garbage!
header.ID = msg_id; // Set the ID
header.EFC = 0;
header.MM = 0;
header.RTR = 0;
header.XTD = 0; // We are not using an extended ID in this example
header.ESI = 0; // Error state indicator
if(frameType == CANFDLLD_MCANFrameType_FD)
{
header.FDF = 1; // CAN FD frame enabled
header.BRS = 1; // Bit rate switch enable
header.DLC = MCAN_DLC_64B; // DLC is the remaining len?
TCAN4x5x_MCAN_WriteTXBuffer(0, &header, txmsg);
TCAN4x5x_MCAN_TransmitBufferContents(0);
uint32_t debugValue = AHB_READ_32(REG_DEV_IR);
}
...
}
*I tried setting the DLC to 64B as when I was sending the length (in bytes) of the txmsg, I was getting the same error.
When I read REG_DEV_IR, I get the following: 0x00000E0

Could you advise on what might be the issue?
Thank you,
Jin