Part Number: DP83TC814S-Q1
Other Parts Discussed in Thread: DP83TC812EVM-MC
Tool/software:
Hello TI Team,
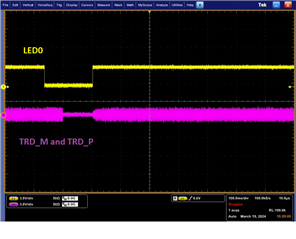
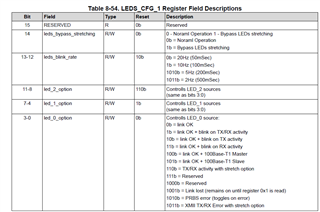
LED0 has the function of Link-OK indication.
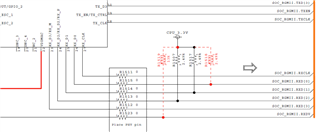
Does it output blink_rate when it links OK?
Now, we can't measure the blink rate when it links ok.
How to configurate the function?
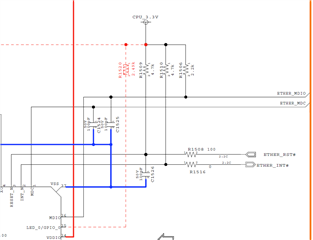
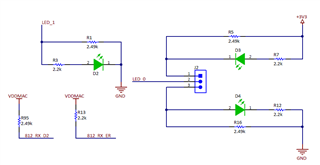
Below is our schematic:
Best Regards!