


Part Number: TCAN1146-Q1
Other Parts Discussed in Thread: TCAN1043-Q1, , TCAN1043, TCAN1145EVM
Tool/software:
Hi team,
Could you help take a look at below questions from customer about TCAN1146-Q1 and TCAN1043-Q1?
TCAN1146
1. How do we clear the bus fault?
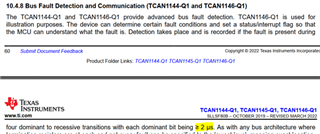
- Datasheet says Bus Fault ( CANH & CANL -> SCG, SCB; Short b/w CANH and CANL etc.,) would be detected if the fault present during the four dominant to recessive transition with each dominant bit being ≥ 2 µs.
I understand that bus Fault would store in register 8'h54. I would like to understand, how do we clear this fault in TCAN1146?
( In case of TCAN1043A, it says that Bus fault flag cleared, in normal mode, if no CAN bus fault is detected for four consecutive dominant-to-recessive transitions on the TXD pin or leaving the Normal mode)
2. Range of differential resistance load to detect Bus fault
- Is the bus fault (CANH Shorted to VBAT, CANH Shorted to GND, CANL Shorted to VBAT, CANL Shorted to GND, CANH Shorted to VCC, CANL Shorted to VCC) depends on the differential CAN Bus resistance?
(In case of TCAN1043, bus fault circuitry able to detect the mentioned bus fault with the Bus differential resistance b/w 45 to 70 ohm )
3. Do we have EVM for TCAN1146? In TI website I could see only for TCAN1043 not for TCAN1146
TCAN1043
1. After initial power ON, nFault stays “LOW” but, it still “LOW” even the mode changed to Normal. Is this expected?
( nFault going to “HIGH” after a data being transmitted on the Bus or upon leaving the normal mode )
Thank you,
Muwei Zheng


