


Part Number: TCAN1042HGV
Hi team,
My customer wants to use the device TCAN1042HGV for CAN interface. Could you please help share more information about Bus Fault? What will happen when it trigger the Bus Fault protection? What's the advantages of the feature?
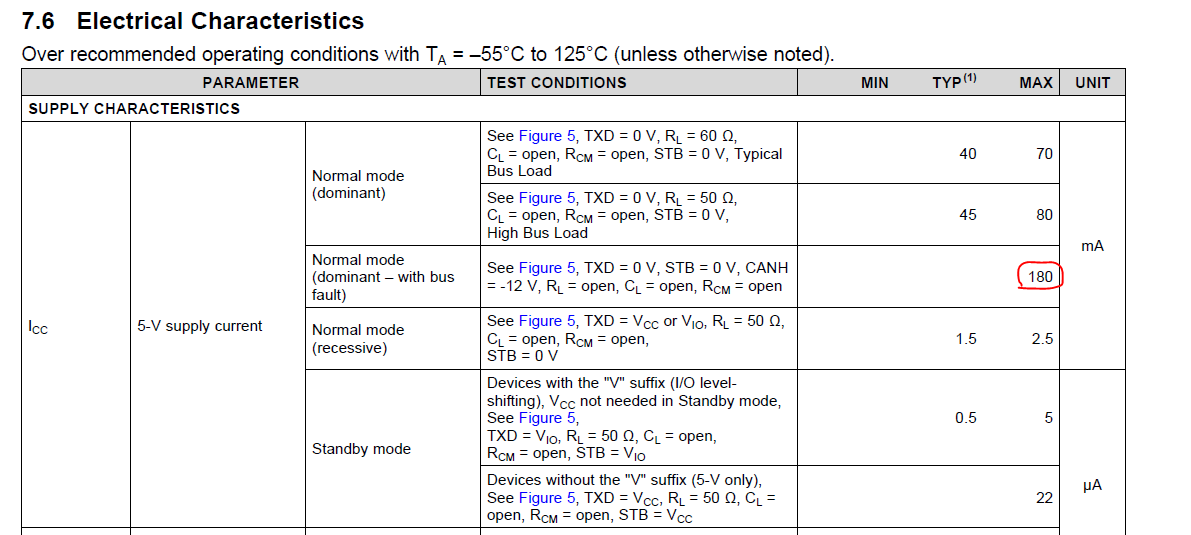
For the ICC current below. why the bus fault mode current is 180mA? which is larger. For normal working condition without bus fault the current will be 80mA, correct?
Thanks.
