



Link to the old thread:
Hello,
here is my concept.
The function convertStreamDataxxxxx is an exact precalculation for a number of 161 pixels per strip and for four strips.
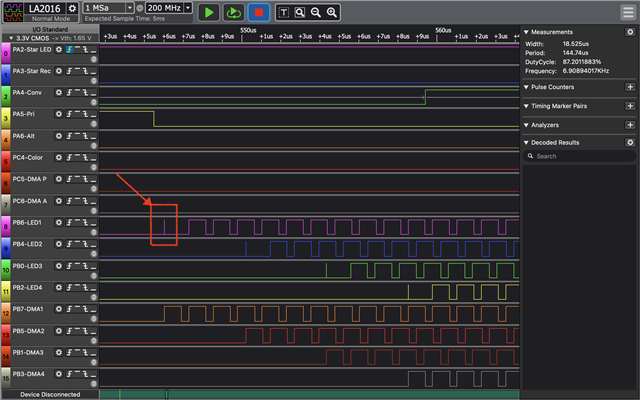
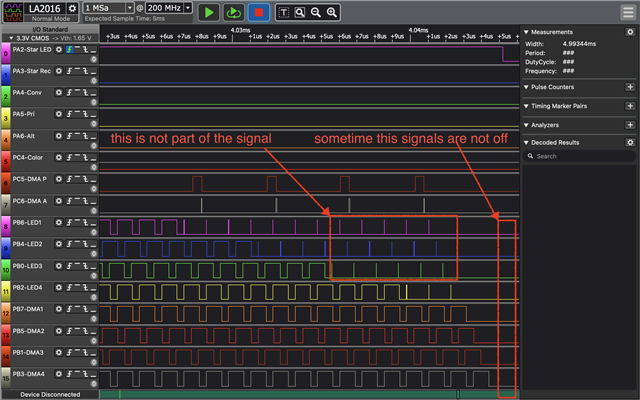
But I have problems at the moment when I start the timers and when I stop the timers.
Here are the start and stop times:
Any ideas to fix this ?
6165.project.c
/*
* ====================================================================
*
* MIT License
*
* Copyright (c) [2022]
* [Jan Grossniklaus, Jan Kunert, Sascha Hildebrands, Kevin Hinrichs]
*
* Permission is hereby granted, free of charge, to any person
* obtaining a copy of this software and associated documentation
* files (the "Software"), to deal in the Software without
* restriction, including without limitation the rights to use, copy,
* modify, merge, publish, distribute, sublicense, and/or sell copies
* of the Software, and to permit persons to whom the Software is
* urnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall
* be included in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
* OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
* NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS
* BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN
* ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
* SOFTWARE.
*
* ====================================================================
*/
/*
+ --------------------------------------------------------------------
+
+ Created : 18/04/2022
+ Owner : Kevin Hinrichs
+
+ Description: Musik spectrum analyzer make cool effects
+ on a LED stripe Matrix to music.
+
+ --------------------------------------------------------------------
*/
#define EXTERN
#include <stdint.h>
#include <stdbool.h>
#include <stdio.h>
#include <arm_math.h>
#include "project.h" // global header file
#include "tm4c123gxl_init.h"
#include "ws2812b.h"
#include "inc/hw_memmap.h"
#include "driverlib/gpio.h"
//*********************************************************************
//
// Info
// Version: RC 2.01
// SRAM:
// 2.048 Bytes SRAM --> system stack
// 1.024 Bytes SRAM --> uDMA control table
// 12.481 Bytes SRAM --> led driver
// -----------------
// 15.523 Bytes SRAM
//
//*********************************************************************
//*********************************************************************
//
// Hardware SETUP
//
// LED DATA SIGNAL 1: PB6
// LED DATA SIGNAL 2: PB4
// LED DATA SIGNAL 3: PB0
// LED DATA SIGNAL 4: PB2
//
// Need to be bridged: PB7 <---> PA7
// Need to be bridged: PB5 <---> PC7
// Need to be bridged: PB1 <---> PD3
// Need to be bridged: PB3 <---> PF2
//
//*********************************************************************
//*********************************************************************
//
// MAIN
//
//*********************************************************************
void main()
{
//*****************************************************************
//
// Locale Variable
//
//*****************************************************************
static streamDataDataTyp streamData; // 12.481 Bytes SRAM
//*****************************************************************
//
// Hardware Main Setup
//
//*****************************************************************
init_hardware();
//*****************************************************************
//
// Debug Mode
//
//*****************************************************************
#ifndef DEBUG_OFF
init_GPIO_DEBUG();
// reset all debug pins
DEBUG_PA2 = 0;
DEBUG_PA3 = 0;
DEBUG_PA4 = 0;
DEBUG_PA5 = 0;
DEBUG_PA6 = 0;
DEBUG_PC4 = 0;
DEBUG_PC5 = 0;
DEBUG_PC6 = 0;
DEBUG_PE0 = 0;
DEBUG_PE1 = 0;
DEBUG_PE2 = 0;
DEBUG_PE3 = 0;
DEBUG_PE4 = 0;
DEBUG_PE5 = 0;
DEBUG_PF0 = 0;
DEBUG_PF1 = 0;
DEBUG_PF3 = 0;
DEBUG_PF4 = 0;
//
// ***LA2016 - LED-Signal***
//
// DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
// DEBUG_PA5 = GPIO_PIN_5; // CH03 Pri
// DEBUG_PA6 = GPIO_PIN_6; // CH04 Alt
// DEBUG_PC4 = GPIO_PIN_4; // CH05 Color
// DEBUG_PC5 = GPIO_PIN_5; // CH06 DMAP
// DEBUG_PC6 = GPIO_PIN_6; // CH07 DMAA
// PB6 -> CH08 // LED1
// PB4 -> CH09 // LED2
// PB0 -> CH10 // LED3
// PB2 -> CH11 // LED4
// PB7 -> CH12 // DMA1
// PB5 -> CH13 // DMA2
// PB1 -> CH14 // DMA3
// PB3 -> CH15 // DMA4
//
// ***LA5016 - DSP***
//
// DEBUG_PE0 = GPIO_PIN_0; // CH02 Pri
// DEBUG_PE1 = GPIO_PIN_1; // CH03 Alt
// DEBUG_PE2 = GPIO_PIN_2; // CH04 Mic
// DEBUG_PE3 = GPIO_PIN_3; // CH05 DMA P
// DEBUG_PE4 = GPIO_PIN_4; // CH06 DMA A
// DEBUG_PE5 = GPIO_PIN_5; // CH07 AGC
// DEBUG_PF0 = GPIO_PIN_0; // CH08 FFT
// DEBUG_PF1 = GPIO_PIN_1; // CH09 FBand
// DEBUG_PF3 = GPIO_PIN_3; // CH10
// DEBUG_PF4 = GPIO_PIN_4; // CH11
// CH12
// CH13
// CH14
// CH15
//
// ***LA2016 / LA5016***
//
// DEBUG_PA2 = GPIO_PIN_2; // CH00 Start LED
// DEBUG_PA3 = GPIO_PIN_3; // CH01 Start Rec
#endif
streamData.sendLedData = 1;
// switch all leds with full white
for (int i = 0; i < 464; i++)
{
streamData.pixelData[i][0] = 255;
streamData.pixelData[i][1] = 255;
streamData.pixelData[i][2] = 255;
}
while (1)
{
if (streamData.sendLedData)
{
if (sendLED(&streamData))
{
streamData.sendLedData--;
}
}
}
}
tm4c123gxl_init.c
/*
* ====================================================================
*
* MIT License
*
* Copyright (c) [2022]
* [Jan Grossniklaus, Jan Kunert, Sascha Hildebrands, Kevin Hinrichs]
*
* Permission is hereby granted, free of charge, to any person
* obtaining a copy of this software and associated documentation
* files (the "Software"), to deal in the Software without
* restriction, including without limitation the rights to use, copy,
* modify, merge, publish, distribute, sublicense, and/or sell copies
* of the Software, and to permit persons to whom the Software is
* urnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall
* be included in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
* OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
* NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS
* BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN
* ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
* SOFTWARE.
*
* ====================================================================
*/
/*
+ --------------------------------------------------------------------
+
+ Created : 13/03/2022
+ Owner : Kevin Hinrichs
+
+ Description: Hardware setup for Texas Instruments EK-TM4C123GXL
+ TM4C123G LaunchPad Evaluation Kit.
+
+ --------------------------------------------------------------------
*/
#include <stdint.h>
#include <stdbool.h>
#include <stdio.h>
#include <arm_math.h>
#include "project.h" // global header file
#include "tm4c123gxl_init.h"
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "driverlib/sysctl.h"
#include "driverlib/gpio.h"
#include "driverlib/pin_map.h"
#include "driverlib/rom.h"
#include "driverlib/rom_map.h"
#include "driverlib/interrupt.h"
#include "driverlib/timer.h"
#include "driverlib/udma.h"
//*********************************************************************
//
// The error routine that is called if the driver library error.
//
//*********************************************************************
#ifdef DEBUG
void
__error__(char *pcFilename, uint32_t ui32Line)
{
}
#endif
//*********************************************************************
//
// Interrupts Handler
//
//*********************************************************************
void uDMAErrorIntHandler(void)
{
#ifndef DEBUG_OFF
MAP_uDMAErrorStatusClear();
uDMAErrorHandlerCounter++;
#endif
}
//*********************************************************************
//
// Functions
//
//*********************************************************************
void init_SYS_CLOCK()
{
// 80Mhz Clock
MAP_SysCtlClockSet(SYSCTL_SYSDIV_2_5 | SYSCTL_USE_PLL |
SYSCTL_OSC_MAIN | SYSCTL_XTAL_16MHZ);
MAP_SysCtlDelay(10);
}
void init_FPU()
{
MAP_FPUEnable();
MAP_FPULazyStackingEnable();
MAP_SysCtlDelay(10);
}
void init_GPIO_CLOCK_A()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOA));
}
void init_GPIO_CLOCK_B()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOB));
}
void init_GPIO_CLOCK_C()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOC);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOC));
}
void init_GPIO_CLOCK_D()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOD));
}
void init_GPIO_CLOCK_E()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOE);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOE));
}
void init_GPIO_CLOCK_F()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOF);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOF));
}
void init_uDMA_TRIGGER_0()
{
// GPIO TIGGER 0: PA7
MAP_GPIODirModeSet(GPIO_PORTA_BASE, GPIO_PIN_7,
GPIO_DIR_MODE_IN);
MAP_GPIOPadConfigSet(GPIO_PORTA_BASE, GPIO_PIN_7,
GPIO_STRENGTH_2MA, GPIO_PIN_TYPE_STD_WPU);
MAP_GPIODMATriggerEnable(GPIO_PORTA_BASE, GPIO_PIN_7);
MAP_GPIOIntTypeSet(GPIO_PORTA_BASE, GPIO_PIN_7, GPIO_FALLING_EDGE);
MAP_GPIOIntEnable(GPIO_PORTA_BASE, GPIO_INT_DMA);
// ------------------ //
// Priority Levels
// Priority 4 = 0xE0 ->lower
// Priority 3 = 0x60
// Priority 2 = 0x20
// Priority 1 = 0x00 ->higher
// ------------------ //
MAP_IntPrioritySet(INT_GPIOA, 0x00); // Priority 1 !!!
MAP_IntEnable(INT_GPIOA);
}
void init_uDMA_TRIGGER_1()
{
// GPIO TIGGER C: PC7
MAP_GPIODirModeSet(GPIO_PORTC_BASE, GPIO_PIN_7,
GPIO_DIR_MODE_IN);
MAP_GPIOPadConfigSet(GPIO_PORTC_BASE, GPIO_PIN_7,
GPIO_STRENGTH_2MA, GPIO_PIN_TYPE_STD_WPU);
MAP_GPIODMATriggerEnable(GPIO_PORTC_BASE, GPIO_PIN_7);
MAP_GPIOIntTypeSet(GPIO_PORTC_BASE, GPIO_PIN_7, GPIO_FALLING_EDGE);
MAP_GPIOIntEnable(GPIO_PORTC_BASE, GPIO_INT_DMA);
// ------------------ //
// Priority Levels
// Priority 4 = 0xE0 ->lower
// Priority 3 = 0x60
// Priority 2 = 0x20
// Priority 1 = 0x00 ->higher
// ------------------ //
MAP_IntPrioritySet(INT_GPIOC, 0x00); // Priority 1 !!!
MAP_IntEnable(INT_GPIOC);
}
void init_uDMA_TRIGGER_2()
{
// GPIO TIGGER D: PD3
MAP_GPIODirModeSet(GPIO_PORTD_BASE, GPIO_PIN_3,
GPIO_DIR_MODE_IN);
MAP_GPIOPadConfigSet(GPIO_PORTD_BASE, GPIO_PIN_3,
GPIO_STRENGTH_2MA, GPIO_PIN_TYPE_STD_WPU);
MAP_GPIODMATriggerEnable(GPIO_PORTD_BASE, GPIO_PIN_3);
MAP_GPIOIntTypeSet(GPIO_PORTD_BASE, GPIO_PIN_3, GPIO_FALLING_EDGE);
MAP_GPIOIntEnable(GPIO_PORTD_BASE, GPIO_INT_DMA);
// ------------------ //
// Priority Levels
// Priority 4 = 0xE0 ->lower
// Priority 3 = 0x60
// Priority 2 = 0x20
// Priority 1 = 0x00 ->higher
// ------------------ //
MAP_IntPrioritySet(INT_GPIOD, 0x00); // Priority 1 !!!
MAP_IntEnable(INT_GPIOD);
}
void init_uDMA_TRIGGER_3()
{
// GPIO TIGGER E: PF2
MAP_GPIODirModeSet(GPIO_PORTF_BASE, GPIO_PIN_2,
GPIO_DIR_MODE_IN);
MAP_GPIOPadConfigSet(GPIO_PORTF_BASE, GPIO_PIN_2,
GPIO_STRENGTH_2MA, GPIO_PIN_TYPE_STD_WPU);
MAP_GPIODMATriggerEnable(GPIO_PORTF_BASE, GPIO_PIN_2);
MAP_GPIOIntTypeSet(GPIO_PORTF_BASE, GPIO_PIN_2, GPIO_FALLING_EDGE);
MAP_GPIOIntEnable(GPIO_PORTF_BASE, GPIO_INT_DMA);
// ------------------ //
// Priority Levels
// Priority 4 = 0xE0 ->lower
// Priority 3 = 0x60
// Priority 2 = 0x20
// Priority 1 = 0x00 ->higher
// ------------------ //
MAP_IntPrioritySet(INT_GPIOF, 0x00); // Priority 1 !!!
MAP_IntEnable(INT_GPIOF);
}
void init_TIMER_0()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_TIMER0);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_TIMER0));
// Timer 0A is the data signal 1: PB6
// Timer 0B is the udma trigger signal to GPIO: PB7
MAP_GPIOPinConfigure(GPIO_PB6_T0CCP0);
MAP_GPIOPinConfigure(GPIO_PB7_T0CCP1);
MAP_GPIOPinTypeTimer(GPIO_PORTB_BASE, GPIO_PIN_6);
MAP_GPIOPinTypeTimer(GPIO_PORTB_BASE, GPIO_PIN_7);
MAP_TimerConfigure(TIMER0_BASE, TIMER_CFG_SPLIT_PAIR |
TIMER_CFG_A_PWM | TIMER_CFG_B_PWM);
MAP_TimerLoadSet(TIMER0_BASE, TIMER_BOTH,
(SysCtlClockGet()/SIGNAL_FREQUENZ) - 1);
// start led signal with the reset signal
MAP_TimerMatchSet(TIMER0_BASE, TIMER_A, SIGNAL_RESET);
// DMA Request
MAP_TimerMatchSet(TIMER0_BASE, TIMER_B, SIGNAL_DMA);
}
void init_TIMER_1()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_TIMER1);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_TIMER1));
// Timer 1A is the data signal 2: PB4
// Timer 1B is the udma trigger signal to GPIO: PB5
MAP_GPIOPinConfigure(GPIO_PB4_T1CCP0);
MAP_GPIOPinConfigure(GPIO_PB5_T1CCP1);
MAP_GPIOPinTypeTimer(GPIO_PORTB_BASE, GPIO_PIN_4);
MAP_GPIOPinTypeTimer(GPIO_PORTB_BASE, GPIO_PIN_5);
MAP_TimerConfigure(TIMER1_BASE, TIMER_CFG_SPLIT_PAIR |
TIMER_CFG_A_PWM | TIMER_CFG_B_PWM);
MAP_TimerLoadSet(TIMER1_BASE, TIMER_BOTH,
(SysCtlClockGet()/SIGNAL_FREQUENZ) - 1);
// start led signal with the reset signal
MAP_TimerMatchSet(TIMER1_BASE, TIMER_A, SIGNAL_RESET);
// DMA Request
MAP_TimerMatchSet(TIMER1_BASE, TIMER_B, SIGNAL_DMA);
}
void init_TIMER_2()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_TIMER2);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_TIMER2));
// Timer 2A is the data signal 3: PB0
// Timer 2B is the udma trigger signal to GPIO: PB1
MAP_GPIOPinConfigure(GPIO_PB0_T2CCP0);
MAP_GPIOPinConfigure(GPIO_PB1_T2CCP1);
MAP_GPIOPinTypeTimer(GPIO_PORTB_BASE, GPIO_PIN_0);
MAP_GPIOPinTypeTimer(GPIO_PORTB_BASE, GPIO_PIN_1);
MAP_TimerConfigure(TIMER2_BASE, TIMER_CFG_SPLIT_PAIR |
TIMER_CFG_A_PWM | TIMER_CFG_B_PWM);
MAP_TimerLoadSet(TIMER2_BASE, TIMER_BOTH,
(SysCtlClockGet()/SIGNAL_FREQUENZ) - 1);
// start led signal with the reset signal
MAP_TimerMatchSet(TIMER2_BASE, TIMER_A, SIGNAL_RESET);
// DMA Request
MAP_TimerMatchSet(TIMER2_BASE, TIMER_B, SIGNAL_DMA);
}
void init_TIMER_3()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_TIMER3);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_TIMER3));
// Timer 3A is the data signal 4: PB2
// Timer 3B is the udma trigger signal to GPIO: PB3
// special setup because GPIO is locked and preconfigured
MAP_GPIOUnlockPin(GPIO_PORTB_BASE, GPIO_PIN_2);
MAP_GPIOUnlockPin(GPIO_PORTB_BASE, GPIO_PIN_3);
MAP_GPIOPinConfigure(GPIO_PB2_T3CCP0);
MAP_GPIOPinConfigure(GPIO_PB3_T3CCP1);
MAP_GPIOPinTypeTimer(GPIO_PORTB_BASE, GPIO_PIN_2);
MAP_GPIOPinTypeTimer(GPIO_PORTB_BASE, GPIO_PIN_3);
MAP_TimerConfigure(TIMER3_BASE, TIMER_CFG_SPLIT_PAIR |
TIMER_CFG_A_PWM | TIMER_CFG_B_PWM);
MAP_TimerLoadSet(TIMER3_BASE, TIMER_BOTH,
(SysCtlClockGet()/SIGNAL_FREQUENZ) - 1);
// start led signal with the reset signal
MAP_TimerMatchSet(TIMER3_BASE, TIMER_A, SIGNAL_RESET);
// DMA Request
MAP_TimerMatchSet(TIMER3_BASE, TIMER_B, SIGNAL_DMA);
}
void init_WTIMER_5()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_WTIMER5);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_WTIMER5));
// WTimer 5A is PD6 and the trigger for adc
// WTimer 5B is PD7 and the timer for led reset time
MAP_TimerConfigure(WTIMER5_BASE, TIMER_CFG_SPLIT_PAIR |
TIMER_CFG_A_PERIODIC | TIMER_CFG_A_ONE_SHOT);
// WTimer 5B
// set ADC sampling frequency
MAP_TimerLoadSet(WTIMER5_BASE, TIMER_B,
(SysCtlClockGet()/SIGNAL_RESET_FREQUENZ) - 1);
// WTimer 5B
// enable timer done interrupt
TimerIntEnable(WTIMER5_BASE, TIMER_TIMB_TIMEOUT);
IntEnable(INT_WTIMER5B);
}
void init_uDMA()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_UDMA);
while(!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_UDMA));
// general uDMA setup
MAP_uDMAEnable();
MAP_SysCtlDelay(10);
// declare controltable
MAP_uDMAControlBaseSet(uDMAControlTable);
MAP_SysCtlDelay(10);
#ifndef DEBUG_OFF
MAP_IntEnable(INT_UDMAERR);
#endif
}
void init_uDMA_LED0()
{
// signal 0
// uDMA Channel 4
MAP_uDMAChannelAssign(UDMA_CH4_GPIOA);
MAP_uDMAChannelAttributeDisable(4,
UDMA_ATTR_ALTSELECT |
UDMA_ATTR_HIGH_PRIORITY |
UDMA_ATTR_REQMASK |
UDMA_ATTR_USEBURST);
MAP_uDMAChannelControlSet(4 | UDMA_PRI_SELECT,
UDMA_SIZE_16 | UDMA_SRC_INC_16 |
UDMA_DST_INC_NONE | UDMA_ARB_1);
MAP_uDMAChannelControlSet(4 | UDMA_ALT_SELECT,
UDMA_SIZE_16 | UDMA_SRC_INC_16 |
UDMA_DST_INC_NONE | UDMA_ARB_1);
//MAP_uDMAChannelAttributeEnable(4, UDMA_ATTR_HIGH_PRIORITY);
}
void init_uDMA_LED1()
{
// signal 1
// uDMA Channel 6
MAP_uDMAChannelAssign(UDMA_CH6_GPIOC);
MAP_uDMAChannelAttributeDisable(6,
UDMA_ATTR_ALTSELECT |
UDMA_ATTR_HIGH_PRIORITY |
UDMA_ATTR_REQMASK |
UDMA_ATTR_USEBURST);
MAP_uDMAChannelControlSet(6 | UDMA_PRI_SELECT,
UDMA_SIZE_16 | UDMA_SRC_INC_16 |
UDMA_DST_INC_NONE | UDMA_ARB_1);
MAP_uDMAChannelControlSet(6 | UDMA_ALT_SELECT,
UDMA_SIZE_16 | UDMA_SRC_INC_16 |
UDMA_DST_INC_NONE | UDMA_ARB_1);
//MAP_uDMAChannelAttributeEnable(6, UDMA_ATTR_HIGH_PRIORITY);
}
void init_uDMA_LED2()
{
// signal 2
// uDMA Channel 7
MAP_uDMAChannelAssign(UDMA_CH7_GPIOD);
MAP_uDMAChannelAttributeDisable(7,
UDMA_ATTR_ALTSELECT |
UDMA_ATTR_HIGH_PRIORITY |
UDMA_ATTR_REQMASK |
UDMA_ATTR_USEBURST);
MAP_uDMAChannelControlSet(7 | UDMA_PRI_SELECT,
UDMA_SIZE_16 | UDMA_SRC_INC_16 |
UDMA_DST_INC_NONE | UDMA_ARB_1);
MAP_uDMAChannelControlSet(7 | UDMA_ALT_SELECT,
UDMA_SIZE_16 | UDMA_SRC_INC_16 |
UDMA_DST_INC_NONE | UDMA_ARB_1);
//MAP_uDMAChannelAttributeEnable(7, UDMA_ATTR_HIGH_PRIORITY);
}
void init_uDMA_LED3()
{
// signal 3
// uDMA Channel 15
MAP_uDMAChannelAssign(UDMA_CH15_GPIOF);
MAP_uDMAChannelAttributeDisable(15,
UDMA_ATTR_ALTSELECT |
UDMA_ATTR_HIGH_PRIORITY |
UDMA_ATTR_REQMASK |
UDMA_ATTR_USEBURST);
MAP_uDMAChannelControlSet(15 | UDMA_PRI_SELECT,
UDMA_SIZE_16 | UDMA_SRC_INC_16 |
UDMA_DST_INC_NONE | UDMA_ARB_1);
MAP_uDMAChannelControlSet(15 | UDMA_ALT_SELECT,
UDMA_SIZE_16 | UDMA_SRC_INC_16 |
UDMA_DST_INC_NONE | UDMA_ARB_1);
//MAP_uDMAChannelAttributeEnable(15, UDMA_ATTR_HIGH_PRIORITY);
}
void init_GPIO_DEBUG()
{
// Port A
//MAP_GPIOUnlockPin(GPIO_PORTA_BASE, GPIO_PIN_2);
MAP_GPIODirModeSet(GPIO_PORTA_BASE, GPIO_PIN_2 | GPIO_PIN_3 |
GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6,
GPIO_DIR_MODE_OUT);
MAP_GPIOPadConfigSet(GPIO_PORTA_BASE, GPIO_PIN_2 | GPIO_PIN_3 |
GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6,
GPIO_STRENGTH_4MA, GPIO_PIN_TYPE_STD);
//-----------------------------------------------------------------
// Port C
MAP_GPIODirModeSet(GPIO_PORTC_BASE, GPIO_PIN_4 | GPIO_PIN_5 |
GPIO_PIN_6, GPIO_DIR_MODE_OUT);
MAP_GPIOPadConfigSet(GPIO_PORTC_BASE, GPIO_PIN_4 | GPIO_PIN_5 |
GPIO_PIN_6, GPIO_STRENGTH_4MA,
GPIO_PIN_TYPE_STD);
//-----------------------------------------------------------------
// Port D
// in used for adc trigger for poti
/*
MAP_GPIODirModeSet(GPIO_PORTD_BASE, GPIO_PIN_7,
GPIO_DIR_MODE_OUT);
MAP_GPIOPadConfigSet(GPIO_PORTD_BASE, GPIO_PIN_7,
GPIO_STRENGTH_4MA, GPIO_PIN_TYPE_STD);
*/
//-----------------------------------------------------------------
// Port E
MAP_GPIODirModeSet(GPIO_PORTE_BASE, GPIO_PIN_0 | GPIO_PIN_1 |
GPIO_PIN_2 | GPIO_PIN_3 | GPIO_PIN_4 | GPIO_PIN_5,
GPIO_DIR_MODE_OUT);
MAP_GPIOPadConfigSet(GPIO_PORTE_BASE, GPIO_PIN_0 | GPIO_PIN_1 |
GPIO_PIN_2 | GPIO_PIN_3 | GPIO_PIN_4 | GPIO_PIN_5,
GPIO_STRENGTH_4MA, GPIO_PIN_TYPE_STD);
//-----------------------------------------------------------------
// Port F
MAP_GPIOUnlockPin(GPIO_PORTF_BASE, GPIO_PIN_0);
MAP_GPIODirModeSet(GPIO_PORTF_BASE, GPIO_PIN_0 | GPIO_PIN_1 |
GPIO_PIN_3 | GPIO_PIN_4, GPIO_DIR_MODE_OUT);
MAP_GPIOPadConfigSet(GPIO_PORTF_BASE, GPIO_PIN_0 | GPIO_PIN_1 |
GPIO_PIN_3 | GPIO_PIN_4,
GPIO_STRENGTH_4MA, GPIO_PIN_TYPE_STD);
//-----------------------------------------------------------------
}
void init_hardware()
{
init_SYS_CLOCK();
init_FPU();
init_GPIO_CLOCK_A();
init_GPIO_CLOCK_B();
init_GPIO_CLOCK_C();
init_GPIO_CLOCK_D();
init_GPIO_CLOCK_E();
init_GPIO_CLOCK_F();
init_uDMA_TRIGGER_0();
init_uDMA_TRIGGER_1();
init_uDMA_TRIGGER_2();
init_uDMA_TRIGGER_3();
init_TIMER_0();
init_TIMER_1();
init_TIMER_2();
init_TIMER_3();
init_WTIMER_5();
init_uDMA();
init_uDMA_LED0();
init_uDMA_LED1();
init_uDMA_LED2();
init_uDMA_LED3();
}
ws2812b.c
/*
* ====================================================================
*
* MIT License
*
* Copyright (c) [2022]
* [Jan Grossniklaus, Jan Kunert, Sascha Hildebrands, Kevin Hinrichs]
*
* Permission is hereby granted, free of charge, to any person
* obtaining a copy of this software and associated documentation
* files (the "Software"), to deal in the Software without
* restriction, including without limitation the rights to use, copy,
* modify, merge, publish, distribute, sublicense, and/or sell copies
* of the Software, and to permit persons to whom the Software is
* urnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall
* be included in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
* OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
* NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS
* BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN
* ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
* SOFTWARE.
*
* ====================================================================
*/
/*
+ --------------------------------------------------------------------
+
+ Created : 10/04/2022
+ Owner : Kevin Hinrichs
+
+ Description: Driver to create the data signal for a
+ ws2812b LED stripe.
+ Four parallel data signals are generated.
+
+ --------------------------------------------------------------------
*/
#include <stdint.h>
#include <stdbool.h>
#include <stdio.h>
#include <arm_math.h>
#include "project.h" // global header file
#include "ws2812b.h"
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "inc/hw_timer.h"
#include "driverlib/rom.h"
#include "driverlib/rom_map.h"
#include "driverlib/udma.h"
#include "driverlib/gpio.h"
#include "driverlib/timer.h"
//*********************************************************************
//
// Interrupts Handler
//
//*********************************************************************
void uDMAGPIOAIntHandler(void)
{
if ((uDMAChannelModeGet(4 | UDMA_PRI_SELECT) == UDMA_MODE_STOP))
{
ledStreamTranferState_PRI[0] = EMPTY;
#ifndef DEBUG_OFF
DEBUG_PC5 = GPIO_PIN_5; // CH06 DMAP
#endif
}
if ((uDMAChannelModeGet(4 | UDMA_ALT_SELECT) == UDMA_MODE_STOP))
{
ledStreamTranferState_ALT[0] = EMPTY;
#ifndef DEBUG_OFF
DEBUG_PC6 = GPIO_PIN_6; // CH07 DMAA
#endif
}
#ifndef DEBUG_OFF
DEBUG_PC5 = 0; // CH06 DMAP
DEBUG_PC6 = 0; // CH07 DMAA
#endif
}
void uDMAGPIOCIntHandler(void)
{
if ((uDMAChannelModeGet(6 | UDMA_PRI_SELECT) == UDMA_MODE_STOP))
{
ledStreamTranferState_PRI[1] = EMPTY;
#ifndef DEBUG_OFF
DEBUG_PC5 = GPIO_PIN_5; // CH06 DMAP
#endif
}
if ((uDMAChannelModeGet(6 | UDMA_ALT_SELECT) == UDMA_MODE_STOP))
{
ledStreamTranferState_ALT[1] = EMPTY;
#ifndef DEBUG_OFF
DEBUG_PC6 = GPIO_PIN_6; // CH07 DMAA
#endif
}
#ifndef DEBUG_OFF
DEBUG_PC5 = 0; // CH06 DMAP
DEBUG_PC6 = 0; // CH07 DMAA
#endif
}
void uDMAGPIODIntHandler(void)
{
if ((uDMAChannelModeGet(7 | UDMA_PRI_SELECT) == UDMA_MODE_STOP))
{
ledStreamTranferState_PRI[2] = EMPTY;
#ifndef DEBUG_OFF
DEBUG_PC5 = GPIO_PIN_5; // CH06 DMAP
#endif
}
if ((uDMAChannelModeGet(7 | UDMA_ALT_SELECT) == UDMA_MODE_STOP))
{
ledStreamTranferState_ALT[2] = EMPTY;
#ifndef DEBUG_OFF
DEBUG_PC6 = GPIO_PIN_6; // CH07 DMAA
#endif
}
#ifndef DEBUG_OFF
DEBUG_PC5 = 0; // CH06 DMAP
DEBUG_PC6 = 0; // CH07 DMAA
#endif
}
void uDMAGPIOFIntHandler(void)
{
if ((uDMAChannelModeGet(15 | UDMA_PRI_SELECT) == UDMA_MODE_STOP))
{
ledStreamTranferState_PRI[3] = EMPTY;
#ifndef DEBUG_OFF
DEBUG_PC5 = GPIO_PIN_5; // CH06 DMAP
#endif
}
if ((uDMAChannelModeGet(15 | UDMA_ALT_SELECT) == UDMA_MODE_STOP))
{
ledStreamTranferState_ALT[3] = EMPTY;
#ifndef DEBUG_OFF
DEBUG_PC6 = GPIO_PIN_6; // CH07 DMAA
#endif
}
#ifndef DEBUG_OFF
DEBUG_PC5 = 0; // CH06 DMAP
DEBUG_PC6 = 0; // CH07 DMAA
#endif
}
void WTIMER5BIntHandler(void)
{
TimerIntClear(WTIMER5_BASE, TIMER_TIMB_TIMEOUT);
// reset time for led is done
ledResetTimeIsRunnig = 0;
}
//*********************************************************************
//
// Functions
//
//*********************************************************************
void startTimer()
{
// start timers with a delay to prevent signal conflicts
// use direct memory access instead of the tivaware
// TIMER 0
TimerEnable(TIMER0_BASE, TIMER_BOTH);
for (int i = 0; i < 3; i++)
{
while ((*((volatile uint32_t *)0x40030054)) <= 15)
{
// ...waiting the period is start
}
while ((*((volatile uint32_t *)0x40030054)) > 15)
{
// ...waiting the period is done
}
}
MAP_SysCtlDelay(1);
// TIMER 1
TimerEnable(TIMER1_BASE, TIMER_BOTH);
for (int i = 0; i < 3; i++)
{
while ((*((volatile uint32_t *)0x40031054)) <= 15)
{
// ...waiting the period is start
}
while ((*((volatile uint32_t *)0x40031054)) > 15)
{
// ...waiting the period is done
}
}
MAP_SysCtlDelay(1);
// TIMER 2
TimerEnable(TIMER2_BASE, TIMER_BOTH);
for (int i = 0; i < 3; i++)
{
while ((*((volatile uint32_t *)0x40032054)) <= 15)
{
// ...waiting the period is start
}
while ((*((volatile uint32_t *)0x40032054)) > 15)
{
// ...waiting the period is done
}
}
MAP_SysCtlDelay(1);
// TIMER 3
TimerEnable(TIMER3_BASE, TIMER_BOTH);
}
void stopTimer()
{
// stop all timers when the signal is off
// use direct memory access instead of the tivaware
// Timer 0A
while ((*((volatile uint32_t *)0x40030050)) > SIGNAL_RESET)
{
// ...waiting the signal is off
}
(*((volatile uint32_t *)0x4003000C)) &= ~0x00000001;
// Timer 1A
while ((*((volatile uint32_t *)0x40031050)) > SIGNAL_RESET)
{
// ...waiting the signal is off
}
(*((volatile uint32_t *)0x4003100C)) &= ~0x00000001;
// Timer 2A
while ((*((volatile uint32_t *)0x40032050)) > SIGNAL_RESET)
{
// ...waiting the signal is 0
}
(*((volatile uint32_t *)0x4003200C)) &= ~0x00000001;
// Timer 3A
while ((*((volatile uint32_t *)0x40033050)) > SIGNAL_RESET)
{
// ...waiting the signal is 0
}
(*((volatile uint32_t *)0x4003300C)) &= ~0x00000001;
// Timer 0B
while ((*((volatile uint32_t *)0x40030054)) > SIGNAL_DMA)
{
// ...waiting the signal is off
}
(*((volatile uint32_t *)0x4003000C)) &= ~0x00000100;
// Timer 1B
while ((*((volatile uint32_t *)0x40031054)) > SIGNAL_DMA)
{
// ...waiting the signal is off
}
(*((volatile uint32_t *)0x4003100C)) &= ~0x00000100;
// Timer 2B
while ((*((volatile uint32_t *)0x40032054)) > SIGNAL_DMA)
{
// ...waiting the signal is 0
}
(*((volatile uint32_t *)0x4003200C)) &= ~0x00000100;
// Timer 3B
while ((*((volatile uint32_t *)0x40033054)) > SIGNAL_DMA)
{
// ...waiting the signal is 0
}
(*((volatile uint32_t *)0x4003300C)) &= ~0x00000100;
/*
// Timer 0
while ((*((volatile uint32_t *)0x40030050)) > SIGNAL_DMA)
{
// ...waiting the signal is off
}
TimerDisable(TIMER0_BASE, TIMER_BOTH);
// Timer 1
while ((*((volatile uint32_t *)0x40031050)) > SIGNAL_DMA)
{
// ...waiting the signal is off
}
TimerDisable(TIMER1_BASE, TIMER_BOTH);
// Timer 2A
while ((*((volatile uint32_t *)0x40032050)) > SIGNAL_DMA)
{
// ...waiting the signal is 0
}
TimerDisable(TIMER2_BASE, TIMER_BOTH);
// Timer 3
while ((*((volatile uint32_t *)0x40033050)) > SIGNAL_DMA)
{
// ...waiting the signal is 0
}
TimerDisable(TIMER3_BASE, TIMER_BOTH);
*/
// reset all counters
(*((volatile uint32_t *)0x40030050)) = 0x00000000;
(*((volatile uint32_t *)0x40030054)) = 0x00000000;
(*((volatile uint32_t *)0x40031050)) = 0x00000000;
(*((volatile uint32_t *)0x40031054)) = 0x00000000;
(*((volatile uint32_t *)0x40032050)) = 0x00000000;
(*((volatile uint32_t *)0x40032054)) = 0x00000000;
(*((volatile uint32_t *)0x40033050)) = 0x00000000;
(*((volatile uint32_t *)0x40033054)) = 0x00000000;
}
void updatePixelData(streamDataDataTyp* streamData, uint16_t offsetNum,
uint8_t red, uint8_t green, uint8_t blue)
{
streamData->pixelData[offsetNum][0] = green;
streamData->pixelData[offsetNum][1] = red;
streamData->pixelData[offsetNum][2] = blue;
}
void convertStreamData0PRI1Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks <----
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 0; i < 29; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_PRI[0][dma_index] = 30;
}
else
{
streamData->streamData_PRI[0][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData1PRI1Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks <----
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 116; i < 145; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_PRI[1][dma_index] = 30;
}
else
{
streamData->streamData_PRI[1][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData2PRI1Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks <----
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 232; i < 261; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_PRI[2][dma_index] = 30;
}
else
{
streamData->streamData_PRI[2][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData3PRI1Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks <----
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 348; i < 377; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_PRI[3][dma_index] = 30;
}
else
{
streamData->streamData_PRI[3][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData0ALT2Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks <----
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 29; i < 58; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_ALT[0][dma_index] = 30;
}
else
{
streamData->streamData_ALT[0][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData1ALT2Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks <----
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 145; i < 174; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_ALT[1][dma_index] = 30;
}
else
{
streamData->streamData_ALT[1][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData2ALT2Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks <----
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 261; i < 290; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_ALT[2][dma_index] = 30;
}
else
{
streamData->streamData_ALT[2][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData3ALT2Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks <----
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 377; i < 406; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_ALT[3][dma_index] = 30;
}
else
{
streamData->streamData_ALT[3][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData0PRI3Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks <----
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 58; i < 87; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_PRI[0][dma_index] = 30;
}
else
{
streamData->streamData_PRI[0][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData1PRI3Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks <----
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 174; i < 203; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_PRI[1][dma_index] = 30;
}
else
{
streamData->streamData_PRI[1][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData2PRI3Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks <----
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 290; i < 319; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_PRI[2][dma_index] = 30;
}
else
{
streamData->streamData_PRI[2][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData3PRI3Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks <----
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 406; i < 435; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_PRI[3][dma_index] = 30;
}
else
{
streamData->streamData_PRI[3][dma_index] = 70;
}
dma_index++;
}
}
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData0ALT4Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks <----
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 87; i < 116; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_ALT[0][dma_index] = 30;
}
else
{
streamData->streamData_ALT[0][dma_index] = 70;
}
dma_index++;
}
}
// put reset code and the end
streamData->streamData_ALT[0][dma_index] = 98;
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData1ALT4Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks <----
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 203; i < 232; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_ALT[1][dma_index] = 30;
}
else
{
streamData->streamData_ALT[1][dma_index] = 70;
}
dma_index++;
}
}
// put reset code and the end
streamData->streamData_ALT[1][dma_index] = 98;
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData2ALT4Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks <----
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 319; i < 348; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_ALT[2][dma_index] = 30;
}
else
{
streamData->streamData_ALT[2][dma_index] = 70;
}
dma_index++;
}
}
// put reset code and the end
streamData->streamData_ALT[2][dma_index] = 98;
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void convertStreamData3ALT4Turn(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA4 = GPIO_PIN_4; // CH02 Conv
#endif
uint32_t datablock;
uint16_t dma_index;
// convert every bit from a datablock (match register timer)
//
// i = datablock size
// j = streamData index
//
// set dma_index
dma_index = 0;
// 1.Turn
// Data0 000-028 Datablocks + 000 Offset = 000-028 Datablocks
// Data1 000-028 Datablocks + 116 Offset = 116-144 Datablocks
// Data2 000-028 Datablocks + 232 Offset = 232-260 Datablocks
// Data3 000-028 Datablocks + 348 Offset = 348-376 Datablocks
// 2.Turn
// Data0 029-057 Datablocks + 000 Offset = 029-057 Datablocks
// Data1 029-057 Datablocks + 116 Offset = 145-173 Datablocks
// Data2 029-057 Datablocks + 232 Offset = 261-289 Datablocks
// Data3 029-057 Datablocks + 348 Offset = 377-405 Datablocks
// 3.Turn
// Data0 058-086 Datablocks + 000 Offset = 058-086 Datablocks
// Data1 058-086 Datablocks + 116 Offset = 174-202 Datablocks
// Data2 058-086 Datablocks + 232 Offset = 290-318 Datablocks
// Data3 058-086 Datablocks + 348 Offset = 406-434 Datablocks
// 4.Turn (+ RESET CODE)
// Data0 087-115 Datablocks + 000 Offset = 087-115 Datablocks
// Data1 087-115 Datablocks + 116 Offset = 203-231 Datablocks
// Data2 087-115 Datablocks + 232 Offset = 319-347 Datablocks
// Data3 087-115 Datablocks + 348 Offset = 435-463 Datablocks <----
// ^
// |
// for the for loop + 1 ---+
//
for (int i = 435; i < 464; i++)
{
datablock = ((streamData->pixelData[i][0] << 16) |
(streamData->pixelData[i][1] << 8) |
(streamData->pixelData[i][2]));
for (int j = (24 - 1); j >= 0; j--)
{
if (datablock & (1 << j))
{
streamData->streamData_ALT[3][dma_index] = 30;
}
else
{
streamData->streamData_ALT[3][dma_index] = 70;
}
dma_index++;
}
}
// put reset code and the end
streamData->streamData_ALT[3][dma_index] = 98;
#ifndef DEBUG_OFF
DEBUG_PA4 = 0; // CH02 Conv
#endif
}
void startStreamPri(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA5 = GPIO_PIN_5; // CH03 Pri
#endif
MAP_uDMAChannelTransferSet(4 | UDMA_PRI_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_PRI[0],
(void *)(TIMER0_BASE + TIMER_O_TAMATCHR),
696);
MAP_uDMAChannelTransferSet(6 | UDMA_PRI_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_PRI[1],
(void *)(TIMER1_BASE + TIMER_O_TAMATCHR),
696);
MAP_uDMAChannelTransferSet(7 | UDMA_PRI_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_PRI[2],
(void *)(TIMER2_BASE + TIMER_O_TAMATCHR),
696);
MAP_uDMAChannelTransferSet(15 | UDMA_PRI_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_PRI[3],
(void *)(TIMER3_BASE + TIMER_O_TAMATCHR),
696);
MAP_uDMAChannelEnable(4 | UDMA_PRI_SELECT);
MAP_uDMAChannelEnable(6 | UDMA_PRI_SELECT);
MAP_uDMAChannelEnable(7 | UDMA_PRI_SELECT);
MAP_uDMAChannelEnable(15 | UDMA_PRI_SELECT);
for (int i = 0; i < 4; i++)
{
ledStreamTranferState_PRI[i] = FULL;
}
#ifndef DEBUG_OFF
DEBUG_PA5 = 0; // CH03 Pri
#endif
}
void startStreamAlt(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA6 = GPIO_PIN_6; // CH04 Alt
#endif
MAP_uDMAChannelTransferSet(4 | UDMA_ALT_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_ALT[0],
(void *)(TIMER0_BASE + TIMER_O_TAMATCHR),
696);
MAP_uDMAChannelTransferSet(6 | UDMA_ALT_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_ALT[1],
(void *)(TIMER1_BASE + TIMER_O_TAMATCHR),
696);
MAP_uDMAChannelTransferSet(7 | UDMA_ALT_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_ALT[2],
(void *)(TIMER2_BASE + TIMER_O_TAMATCHR),
696);
MAP_uDMAChannelTransferSet(15 | UDMA_ALT_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_ALT[3],
(void *)(TIMER3_BASE + TIMER_O_TAMATCHR),
696);
MAP_uDMAChannelEnable(4 | UDMA_ALT_SELECT);
MAP_uDMAChannelEnable(6 | UDMA_ALT_SELECT);
MAP_uDMAChannelEnable(7 | UDMA_ALT_SELECT);
MAP_uDMAChannelEnable(15 | UDMA_ALT_SELECT);
for (int i = 0; i < 4; i++)
{
ledStreamTranferState_ALT[i] = FULL;
}
#ifndef DEBUG_OFF
DEBUG_PA6 = 0; // CH04 Alt
#endif
}
void startStreamAltReset(streamDataDataTyp* streamData)
{
#ifndef DEBUG_OFF
DEBUG_PA6 = GPIO_PIN_6; // CH04 Alt
#endif
MAP_uDMAChannelTransferSet(4 | UDMA_ALT_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_ALT[0],
(void *)(TIMER0_BASE + TIMER_O_TAMATCHR),
697);
MAP_uDMAChannelTransferSet(6 | UDMA_ALT_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_ALT[1],
(void *)(TIMER1_BASE + TIMER_O_TAMATCHR),
697);
MAP_uDMAChannelTransferSet(7 | UDMA_ALT_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_ALT[2],
(void *)(TIMER2_BASE + TIMER_O_TAMATCHR),
697);
MAP_uDMAChannelTransferSet(15 | UDMA_ALT_SELECT,
UDMA_MODE_PINGPONG, &streamData->streamData_ALT[3],
(void *)(TIMER3_BASE + TIMER_O_TAMATCHR),
697);
MAP_uDMAChannelEnable(4 | UDMA_ALT_SELECT);
MAP_uDMAChannelEnable(6 | UDMA_ALT_SELECT);
MAP_uDMAChannelEnable(7 | UDMA_ALT_SELECT);
MAP_uDMAChannelEnable(15 | UDMA_ALT_SELECT);
for (int i = 0; i < 4; i++)
{
ledStreamTranferState_ALT[i] = FULL;
}
#ifndef DEBUG_OFF
DEBUG_PA6 = 0; // CH04 Alt
#endif
}
uint8_t sendLED(streamDataDataTyp* streamData)
{
static uint8_t steps = 0;
uint8_t retValue;
// sending finished
retValue = 0x00;
switch (steps)
{
case 0:
#ifndef DEBUG_OFF
DEBUG_PA2 = GPIO_PIN_2; // CH00 Start LED
#endif
//wait reset time befor start again
if (!ledResetTimeIsRunnig)
{
steps = 1;
}
break;
case 1:
// convert 1.Turn
convertStreamData0PRI1Turn(streamData);
convertStreamData1PRI1Turn(streamData);
convertStreamData2PRI1Turn(streamData);
convertStreamData3PRI1Turn(streamData);
// start 1.Turn
startStreamPri(streamData);
// start timer for led stream
startTimer();
steps = 2;
break;
case 2:
// convert 2.Turn
convertStreamData0ALT2Turn(streamData);
convertStreamData1ALT2Turn(streamData);
convertStreamData2ALT2Turn(streamData);
convertStreamData3ALT2Turn(streamData);
// start 2.Turn
startStreamAlt(streamData);
steps = 3;
break;
case 3:
// wait 1.Turn is finished
if (ledStreamTranferState_PRI[3] == EMPTY &&
ledStreamTranferState_PRI[2] == EMPTY &&
ledStreamTranferState_PRI[1] == EMPTY &&
ledStreamTranferState_PRI[0] == EMPTY)
{
// convert 3.Turn
convertStreamData0PRI3Turn(streamData);
convertStreamData1PRI3Turn(streamData);
convertStreamData2PRI3Turn(streamData);
convertStreamData3PRI3Turn(streamData);
// start 3.Turn
startStreamPri(streamData);
steps = 4;
}
break;
case 4:
// wait 3.Turn is finished
if (ledStreamTranferState_ALT[3] == EMPTY &&
ledStreamTranferState_ALT[2] == EMPTY &&
ledStreamTranferState_ALT[1] == EMPTY &&
ledStreamTranferState_ALT[0] == EMPTY)
{
// convert 4.Turn + Reset Code
convertStreamData0ALT4Turn(streamData);
convertStreamData1ALT4Turn(streamData);
convertStreamData2ALT4Turn(streamData);
convertStreamData3ALT4Turn(streamData);
// start 4.Turn + Reset Code
startStreamAltReset(streamData);
steps = 5;
}
break;
case 5:
// wait 4.Turn is finished
if (ledStreamTranferState_ALT[3] == EMPTY &&
ledStreamTranferState_ALT[2] == EMPTY &&
ledStreamTranferState_ALT[1] == EMPTY &&
ledStreamTranferState_ALT[0] == EMPTY)
{
// sending is finished
retValue = 0x1;
// stop timers for the led stream
stopTimer();
// start reset code time
ledResetTimeIsRunnig = 1;
TimerEnable(WTIMER5_BASE, TIMER_B);
#ifndef DEBUG_OFF
DEBUG_PA2 = 0; // CH00 Start LED
#endif
steps = 0;
}
break;
default:
// ...error
// RED LED from board have to be blinking
// comes later
break;
}
return retValue;
}iar projekt:


