Other Parts Discussed in Thread: CODECOMPOSER, BQ79616, BQ79600EVM, , ISO1050, TMS570LS1224
I know the C2000 controllers and Codecomposer Studio.
But now I need to deal with Hercules TMS570LS1224CPGE on a Launch Pad XL2.
I try to get the BQ79600EVM running with BQ79616 using the UART Example code.
(TMS570 is communicating with UART RX /TX to the BQ79600 and BQ79616 over daisychain)
See setup: bq79600evm-sample-code-do-no-wakeup-to-bq79616-stack
So this Example code does not include CAN Bus. I "simply" want to add CAN bus feature to the existing Code to connect the Board to a PC / Solar inverter.
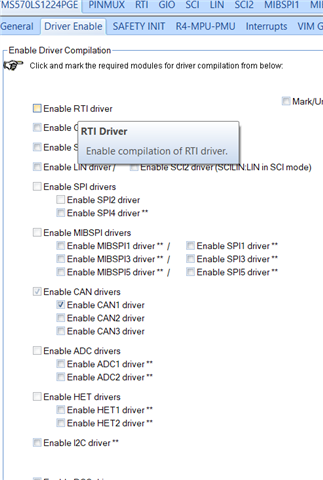
I installed HalCoGen and want to get/learn the configuration for that DCAN1 PinMux and Interrupt handling.
But this story seems to be a bit confusing, comparing to other controllers.
I Watched:
https://www.youtube.com/watch?v=TrKQN-sor-s
and worked also through
probing-your-hercules-launchpad-can-bus-part-2
But in general I dont understand the princible of connecting a physical Pin to a CAN1 RX interrupt or TX Send line.
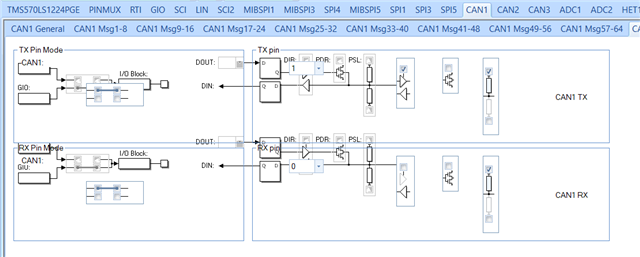
Where to set the Physical pin to CAN1 TX TX?
Is there somewhere a better explaination of configuring the Hercules controllers?
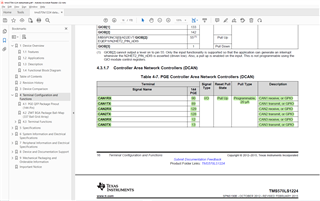
Further confusion is the spns190b.pdf page 95 table 6.32 line 7. It shows, that DCAN and SPI5 are sharing ressources.
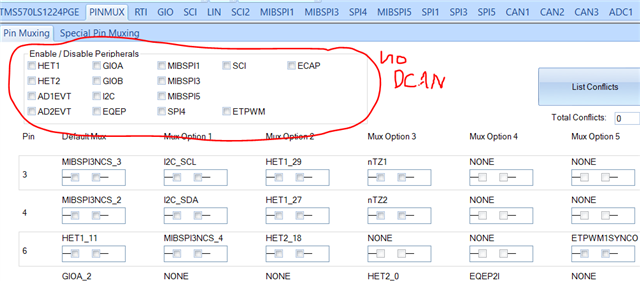
So maybe I have to add MIBSP5 at the PINMuxing tab and magically DCAN1 is also working? but still no physical pin conenction tab?...
Can somebody help to unsertstand the princible or help to configure?
The task is: Add CAN bus feature to existing Code using ISO1050 a the RX TX pins and send out some data...