


Part Number: TM4C1231D5PM
I have a machine with eighteen TM4C1231D5PM microcontrollers on a UART bus. A computer transmits a command to turn on and off GPIO pins connected to relays. A command consists of start character (<), three address characters (018) and either an open (O) or close (C) command finally a end character (>). An example to open a relay would look like, <018O7>. To verify the microcontroller has turned on/off a relay it responds with >0< for open and >1< for closed. When the computer attempts to open all relays on the microcontroller at address 18 it tends to get stuck. The computer will send <018O7> and the microcontroller will respond with "<",
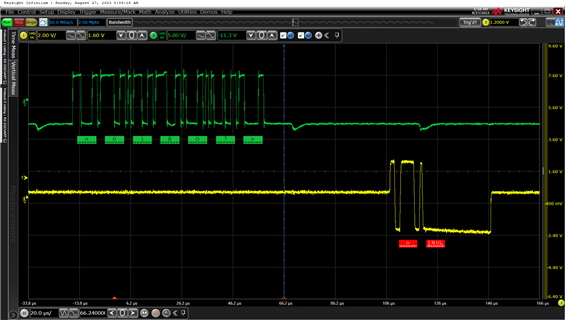
I have written the class that communicates with each microcontroller to re-transmit the same <018O7> command when it receives only ">". Windows does re-transmit, but the microcontroller does not respond.
The UART0 interrupt handler for UART0 is,
void UARTIntHandler(void)
{
uint32_t ui32Status;
//
// Get the interrrupt status.
//
ui32Status = ROM_UARTIntStatus(UART0_BASE, true);
//
// Clear the asserted interrupts.
//
ROM_UARTIntClear(UART0_BASE, ui32Status);
//
// Loop while there are characters in the receive FIFO.
//
cmd_index = 0;
while(ROM_UARTCharsAvail(UART0_BASE))
{
cmd[cmd_index] = ROM_UARTCharGet(UART0_BASE);
cmd_index++;
}
if (cmd[0] == '<')
{
addr_str[0] = cmd[1];
addr_str[1] = cmd[2];
addr_str[2] = cmd[3];
addr = atoi(&addr_str);
if (addr == 18)
{
if (cmd[4] == 'O') //Open Command
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_3, GPIO_PIN_3);
char channel = cmd[5];
if (channel == '0') //Channel 1 -> R8 -> F3
{
ROM_GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_3, 0);
UARTSend(">0<",3);
}
else if(channel == '1') //Channel 2 -> R7 -> F2
{
ROM_GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_2, 0);
UARTSend(">0<",3);
}
else if(channel == '2') //Channel 3 -> R6 -> F1
{
ROM_GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_1, 0);
UARTSend(">0<",3);
}
else if(channel == '3') //Channel 4 -> R5 -> F0
{
ROM_GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_0, 0);
UARTSend(">0<",3);
}
else if(channel == '4') //Channel 5 -> R4 -> A7
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_7, 0);
UARTSend(">0<",3);
}
else if(channel == '5') //Channel 6 -> R3 -> A6
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_6, 0);
UARTSend(">0<",3);
}
else if(channel == '6') //Channel 7 -> R2 -> A5
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_5, 0);
UARTSend(">0<",3);
}
else if(channel == '7') //Channel 8 -> R1 -> A4
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_4, 0);
UARTSend(">0<",3);
}
else if(channel == '8')
{
//Channel SIG8 -> R9 -> B5
ROM_GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_5, 0);
UARTSend(">0<",3);
}
else if (channel == '9')
{
//Channel SIG7 -> R10 -> B4
ROM_GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_4, 0);
UARTSend(">0<",3);
}
else if (channel == 'A')
{
//Channel SIG6 -> R11 -> E4
ROM_GPIOPinWrite(GPIO_PORTE_BASE, GPIO_PIN_4, 0);
UARTSend(">0<",3);
}
else if (channel == 'B')
{
//Channel SIG5 -> R12 -> E5
ROM_GPIOPinWrite(GPIO_PORTE_BASE, GPIO_PIN_5, 0);
UARTSend(">0<",3);
}
else if (channel == 'C')
{
//Channel SIG4 -> R13 -> D0
ROM_GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_0, 0);
UARTSend(">0<",3);
}
else if (channel == 'D')
{
//Channel SIG3 -> R14 -> D1
ROM_GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_1, 0);
UARTSend(">0<",3);
}
else if (channel == 'E')
{
//Channel SIG2 -> R15 -> D2
ROM_GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_2, 0);
UARTSend(">0<",3);
}
else if (channel == 'F')
{
//Channel SIG1 -> R16 -> D3
ROM_GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_3, 0);
UARTSend(">0<",3);
}
}
if (cmd[4] == 'C')
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_3, GPIO_PIN_3);
char channel = cmd[5];
if (channel == '0') //Channel 1 -> R8 -> F3
{
ROM_GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_3, GPIO_PIN_3);
UARTSend(">1<",3);
}
else if(channel == '1') //Channel 2 -> R7 -> F2
{
ROM_GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_2, GPIO_PIN_2);
UARTSend(">1<",3);
}
else if(channel == '2') //Channel 3 -> R6 -> F1
{
ROM_GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_1, GPIO_PIN_1);
UARTSend(">1<",3);
}
else if(channel == '3') //Channel 4 -> R5 -> F0
{
ROM_GPIOPinWrite(GPIO_PORTF_BASE, GPIO_PIN_0, GPIO_PIN_0);
UARTSend(">1<",3);
}
else if(channel == '4') //Channel 5 -> R4 -> A7
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_7, GPIO_PIN_7);
UARTSend(">1<",3);
}
else if(channel == '5') //Channel 6 -> R3 -> A6
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_6, GPIO_PIN_6);
UARTSend(">1<",3);
}
else if(channel == '6') //Channel 7 -> R2 -> A5
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_5, GPIO_PIN_5);
UARTSend(">1<",3);
}
else if(channel == '7') //Channel 8 -> R1 -> A4
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_4, GPIO_PIN_4);
UARTSend(">1<",3);
}
else if(channel == '8')
{
//Channel SIG8 -> R9 -> B5
ROM_GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_5, GPIO_PIN_5);
UARTSend(">1<",3);
}
else if (channel == '9')
{
//Channel SIG7 -> R10 -> B4
ROM_GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_4, GPIO_PIN_4);
UARTSend(">1<",3);
}
else if (channel == 'A')
{
//Channel SIG6 -> R11 -> E4
ROM_GPIOPinWrite(GPIO_PORTE_BASE, GPIO_PIN_4, GPIO_PIN_4);
UARTSend(">1<",3);
}
else if (channel == 'B')
{
//Channel SIG5 -> R12 -> E5
ROM_GPIOPinWrite(GPIO_PORTE_BASE, GPIO_PIN_5, GPIO_PIN_5);
UARTSend(">1<",3);
}
else if (channel == 'C')
{
//Channel SIG4 -> R13 -> D0
ROM_GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_0, GPIO_PIN_0);
UARTSend(">1<",3);
}
else if (channel == 'D')
{
//Channel SIG3 -> R14 -> D1
ROM_GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_1, GPIO_PIN_1);
UARTSend(">1<",3);
}
else if (channel == 'E')
{
//Channel SIG2 -> R15 -> D2
ROM_GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_2, GPIO_PIN_2);
UARTSend(">1<",3);
}
else if (channel == 'F')
{
//Channel SIG1 -> R16 -> D3
ROM_GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_3, GPIO_PIN_3);
UARTSend(">1<",3);
}
}
if (cmd[4] == 'S') //Status Command
{
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_3, GPIO_PIN_3);
char channel = cmd[5];
if (channel == '0') //Channel 1 -> R8 -> F3
{
ch_state = ROM_GPIOPinRead(GPIO_PORTF_BASE, GPIO_PIN_3);
ch_state = ch_state >> 3;
if (ch_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == '1') //Channel 2 -> R7 -> F2
{
ch_state = ROM_GPIOPinRead(GPIO_PORTF_BASE, GPIO_PIN_2);
ch_state = ch_state >> 2;
if (ch_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == '2') //Channel 3 -> R6 -> F1
{
ch_state = ROM_GPIOPinRead(GPIO_PORTF_BASE, GPIO_PIN_1);
ch_state = ch_state >> 1;
if (ch_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == '3') //Channel 4 -> R5 -> F0
{
ch_state = ROM_GPIOPinRead(GPIO_PORTF_BASE, GPIO_PIN_0);
ch_state = ch_state >> 0;
if (ch_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == '4') //Channel 5 -> R4 -> A7
{
ch_state = ROM_GPIOPinRead(GPIO_PORTA_BASE, GPIO_PIN_7);
ch_state = ch_state >> 7;
if (ch_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == '5') //Channel 6 -> R3 -> A6
{
ch_state = ROM_GPIOPinRead(GPIO_PORTA_BASE, GPIO_PIN_6);
ch_state = ch_state >> 6;
if (ch_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == '6') //Channel 7 -> R2 -> A5
{
ch_state = ROM_GPIOPinRead(GPIO_PORTA_BASE, GPIO_PIN_5);
ch_state = ch_state >> 5;
if (ch_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == '7') //Channel 8 -> R1 -> A4
{
ch_state = ROM_GPIOPinRead(GPIO_PORTA_BASE, GPIO_PIN_4);
ch_state = ch_state >> 4;
if (ch_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == '8') //Signal State -> All GPIO Pins Must Be On
{
//Channel SIG8 -> R9 -> B5
s8_state = ROM_GPIOPinRead(GPIO_PORTB_BASE, GPIO_PIN_5);
s8_state = s8_state >> 5;
if (s8_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == '9') //Signal State -> All GPIO Pins Must Be On
{
//Channel SIG7 -> R10 -> B4
s7_state = ROM_GPIOPinRead(GPIO_PORTB_BASE, GPIO_PIN_4);
s7_state = s7_state >> 4;
if (s7_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == 'A') //Signal State -> All GPIO Pins Must Be On
{
//Channel SIG6 -> R11 -> E4
s6_state = ROM_GPIOPinRead(GPIO_PORTE_BASE, GPIO_PIN_4);
s6_state = s6_state >> 4;
if (s6_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == 'B') //Signal State -> All GPIO Pins Must Be On
{
//Channel SIG5 -> R12 -> E5
s5_state = ROM_GPIOPinRead(GPIO_PORTE_BASE, GPIO_PIN_5);
s5_state = s5_state >> 5;
if (s5_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == 'C') //Signal State -> All GPIO Pins Must Be On
{
//Channel SIG4 -> R13 -> D0
s4_state = ROM_GPIOPinRead(GPIO_PORTD_BASE, GPIO_PIN_0);
s4_state = s4_state >> 0;
if (s4_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == 'D') //Signal State -> All GPIO Pins Must Be On
{
//Channel SIG3 -> R14 -> D1
s3_state = ROM_GPIOPinRead(GPIO_PORTD_BASE, GPIO_PIN_1);
s3_state = s3_state >> 1;
if (s3_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == 'E') //Signal State -> All GPIO Pins Must Be On
{
//Channel SIG2 -> R15 -> D2
s2_state = ROM_GPIOPinRead(GPIO_PORTD_BASE, GPIO_PIN_2);
s2_state = s2_state >> 2;
if (s2_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
else if(channel == 'F') //Signal State -> All GPIO Pins Must Be On
{
//Channel SIG1 -> R16 -> D3
s1_state = ROM_GPIOPinRead(GPIO_PORTD_BASE, GPIO_PIN_3);
s1_state = s1_state >> 3;
if (s1_state == 1)
UARTSend(">1<",3);
else
UARTSend(">0<",3);
}
}
}
}
The UARTSend function is,
void
UARTSend(const uint8_t *pui8Buffer, uint32_t ui32Count)
{
//ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_3, GPIO_PIN_3);
//delayMs(10);
//
// Loop while there are more characters to send.
//
while(ui32Count--)
{
//
// Write the next character to the UART.
//
ROM_UARTCharPut(UART0_BASE, *pui8Buffer++);
}
while (ROM_UARTBusy(UART0_BASE))
{
}
ROM_GPIOPinWrite(GPIO_PORTA_BASE, GPIO_PIN_3, 0);
}
Does anyone have any suggestions on how to fix this?
Thanks,
Allan

