- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
I want to use the I2C Master peripheral in a non-blocking way (no infinite while loops).
To do so, I need to learn how to use the TI HalCoGen I2C API with Interrupts.
Sadly I didn't find any examples:
- The TI e2e search feature doesn't show me any results that discuss this topic
- The Official documentation does not contain examples using HalCoGen generated code
- The HalCoGen example folder has 0 mentions of i2cNotification
So I'm turning to this forum :^ )
---
I'm mainly looking for guidance regarding
- How to properly handle STOP in i2cNotification?
- How to properly handle errors in i2cNotification?
- How to properly wait for the bus to be ready before doing other things?
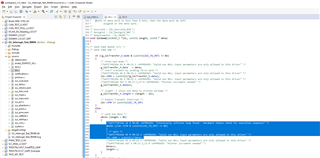
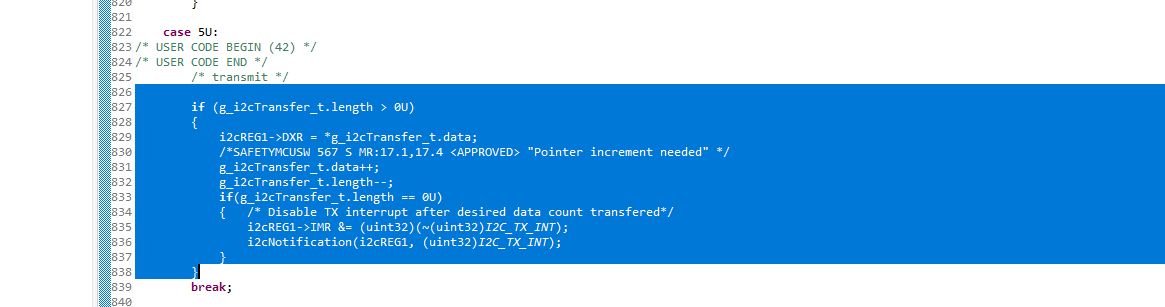
Here's my code right now:
Any advice is appreciated.
Regards,
Gabriel