
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Hi,
I am trying to run the example <C2000WAREINSTALLDIR>\device_support\f2837xd\examples\cpu1\hrpwm_deadband_sfo_v8 in CPU2. I am running GPIO initialization required for ePWM and allocating the ePWMs required to CPU2 in CPU1 as below
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 0;
CpuSysRegs.PCLKCR2.bit.EPWM1 = 0;
CpuSysRegs.PCLKCR2.bit.EPWM2 = 0;
/* Assign used PWM modules to CPU2 */
DevCfgRegs.CPUSEL0.bit.EPWM1 = 1;
DevCfgRegs.CPUSEL0.bit.EPWM2 = 1;
EDIS;
InitEPwm1Gpio();
InitEPwm2Gpio();
Then I perform the rest of ePWM1 and ePWM2 configuration, setting up of ISR and modification of HR period, phase inside ISR in CPU2 after enabling the clock as below
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 0;
CpuSysRegs.PCLKCR2.bit.EPWM1 = 1;
CpuSysRegs.PCLKCR2.bit.EPWM2 = 1;
EDIS;
//
// Init HRPWM1/HRPWM2
//
HRPWM1_Config(360);
HRPWM2_Config(360);
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 1; // Resync PWM timebase clock
(*ePWM[PWM1]).GLDCTL2.bit.OSHTLD = 1; // This should also write to
// GLDCTL2 of PWM2
EDIS;
//
// Configure ePWM1 to generate interrupts on period match
//
(*ePWM[PWM1]).ETSEL.bit.INTSEL = 1; // Interrupt on counter zero match
(*ePWM[PWM1]).ETSEL.bit.INTEN = 1; // Enable peripheral interrupt
(*ePWM[PWM1]).ETPS.bit.INTPRD = 1; // Generate interrupt on every event
PieCtrlRegs.PIEIER3.bit.INTx1 = 1; // Enable ePWM1 interrupt in PIE
IER |= 0x0004; // Enable core INT #3
EINT;
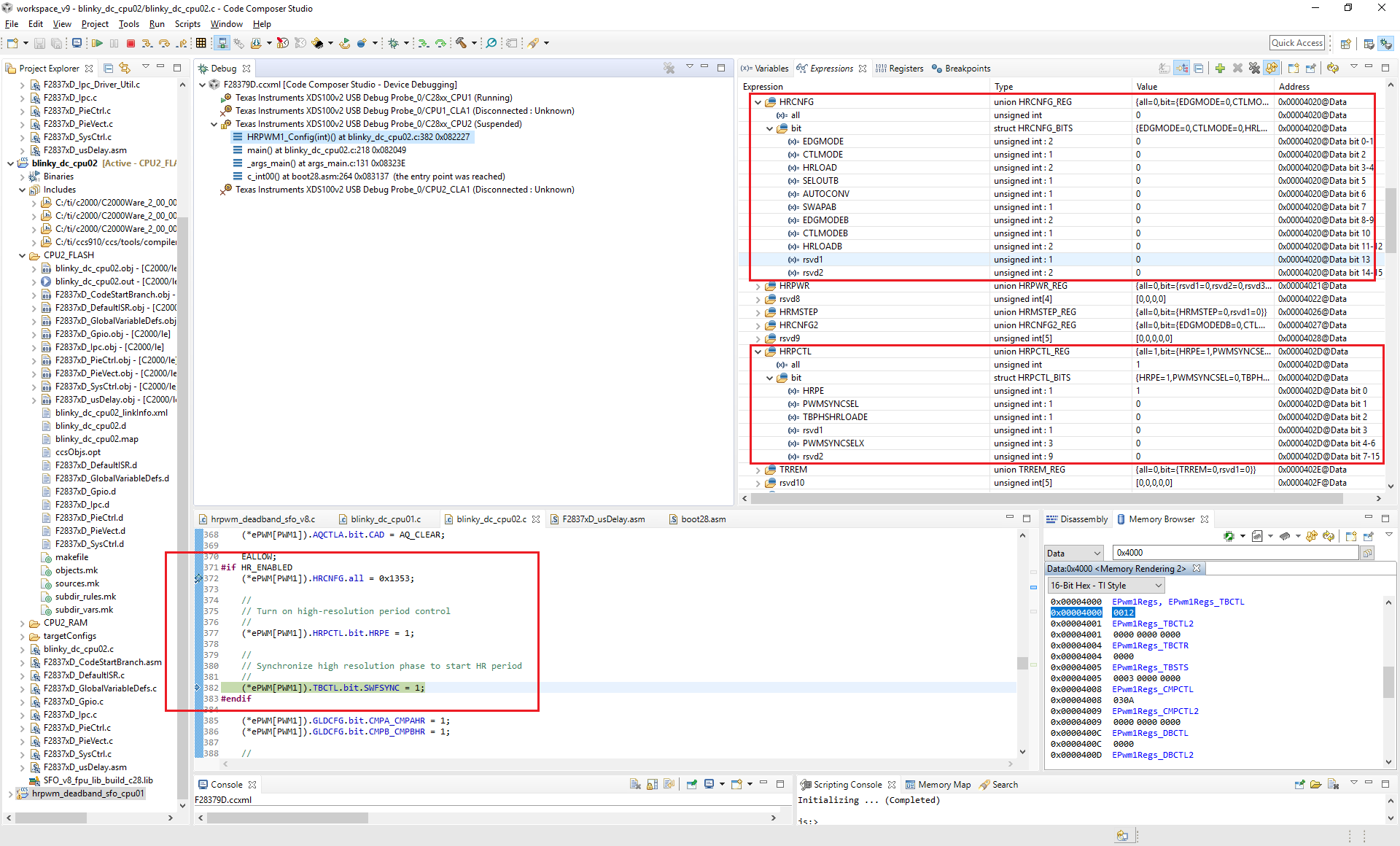
But when I check all the registers of ePWM1 and ePWM2 I see the values are set correctly except for HRCNFG register. I am not sure why this is happening. This issue is not present in CPU1 as I am able to run the example code properly in CPU1. And this issue affects only HRCNFG register and does not impact any other register settings.
I have attached screenshots from CCS with break point set to the particular instruction which will update HRCNFG register value for ePWM1, after executing the instruction by stepping over the code I still cannot observe the value in debug window but if I step through the next instruction which will set HRPE value in HRPCTL register it is updated properly.

I have also ensured that the ePWM1 and ePWM2 are allocated properly to CPU2 and clock is enabled for both ePWM1 and ePWM2.


I have also attached the source code which I have used for both CPU1 and CPU2.
CPU1
CPU2
Please let me know how to solve this problem.
Thanks,
Aditya





