Part Number: MSP430FR2532
Good Day all,
I am hoping I can find a solution to my issue here.
I am using an MSP430FR2532 microcontroller (custom design board) and a single keypad sensor.
For the Keypad sensor design, I followed Ti's Design guide.
For testing the design I used the Ultra Low Power 4 button FR2633 code (modified to single button) provided by Ti in the Captivate Design Centre.
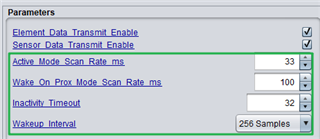
Touch works very well with the default parameters provided in the code, and I am trying to optimise the power consumption.
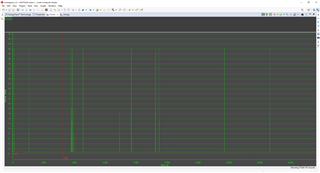
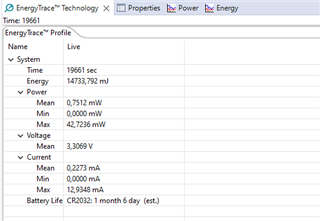
I am using the Captivate FR2633 energy trace to check the power consumption, and the best I achieve is 28 days (on a CR2032 battery setting).
Referring to the Ti documentation, I was expecting 3 years (based on 6uA I-avg/Electrode), single button and Wake-on-proximity, external crystal.
There is probably something simple I am missing, and would appreciate some guidance/steps on how to resolve. Please let me know what further information you require.
Thanks in advance.