


Part Number: MSP430FR60471
Other Parts Discussed in Thread: MSP430FR6047
Hi,
I am working with eUCSIA3 uart of MSP430FR6047. My device is running with 100ms period. I am sending some frames(around 80 bytes each) over serial communication (python script). I am able to send and receive data for around 600 frames and after that the uart stops responding, uart interrupt isn't getting fired. Even if i restart pyserial, issue continuous. But when i restart the debugger the device starts to receive the data.
UART configuration
void ESP_UART_INIT()
{
// Configure USCI_A3 for UART mode
UCA3CTLW0 = UCSWRST; // Put eUSCI in reset
UCA3CTLW0 |= UCSSEL__ACLK; // CLK = ACLK
UCA3BRW = 3; // 9600 baud
UCA3MCTLW |= 0x5300; // 32768/9600 - INT(32768/9600)=0.41
// UCBRSx value = 0x53 (See UG)
UCA3CTLW0 &= ~UCSWRST; // Initialize eUSCI
UCA3IE |= UCRXIE; // Enable USCI_A0 RX interrupt
//Configure RX interrupt to receive UART messages
}
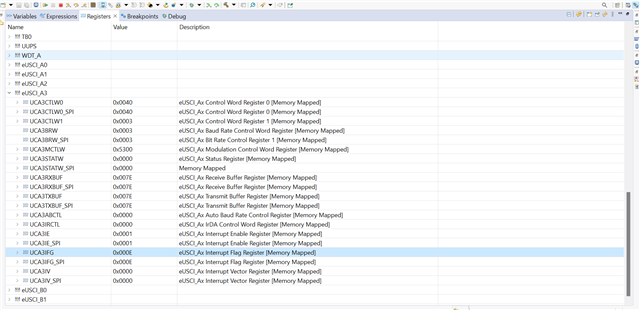
eUSCI registers when device stops responding
I have done some research but could not find whats going wrong. I am new to this so any lead would be really appriciated.
Best Regards,
Nandkishor

