


Other Parts Discussed in Thread: MSP430F5529, MSP430F5510, MSP430F5500
We have just designed a product using MSP430F5529.
I am having some trouble getting the unit to run reliably when no USB is present. I'll explain:
1) We are always powered through the USB connector; there is no other power source for the board.
2) However, it may not be plugged into a computer, we have purchased a small wall-wart that has a USB connector on it.
3) This way the customer can use our device without a computer, it will perform its functions stand-alone.
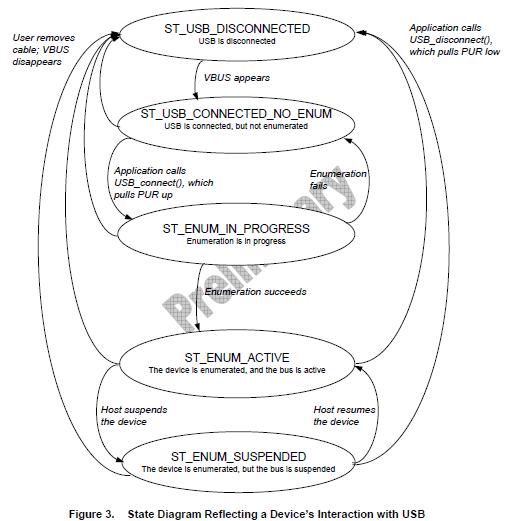
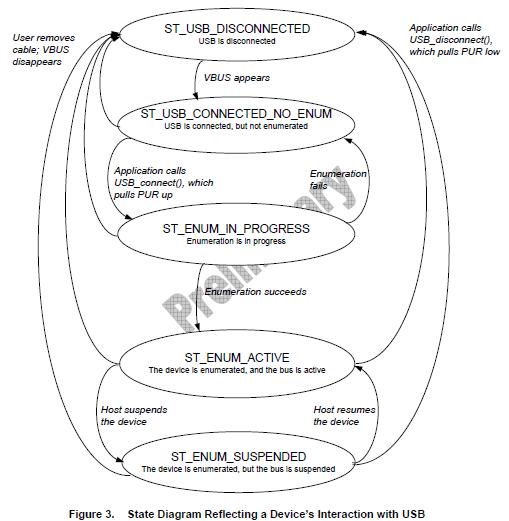
The trouble I'm having is that the unit does not start up reliably (fails 9 out of 10 times) in this mode. I have traced through the code and enabled and disabled various parts of the code. What I have found is that when USB_Connect is called it goes into never-never land; I don't even see a clock output from the device. My suspicion is that it is stuck somewhere waiting for numeration (which will never happen), has possibly entered a low power mode or something like that.
I feel like I need to have a time-out somewhere that waits for enumeration and gives up after a while.
I've been looking at this for a couple days and would appreciate any suggestions that folks may have.
Thanks.
Mike




{kind=link}