Part Number: MSP432P401R
Tool/software: Code Composer Studio
Hello,
In my current setup I am using an STM32F4 discovery board as SPI master and an MSP432P401R (Launchpad) as SPI Slave.
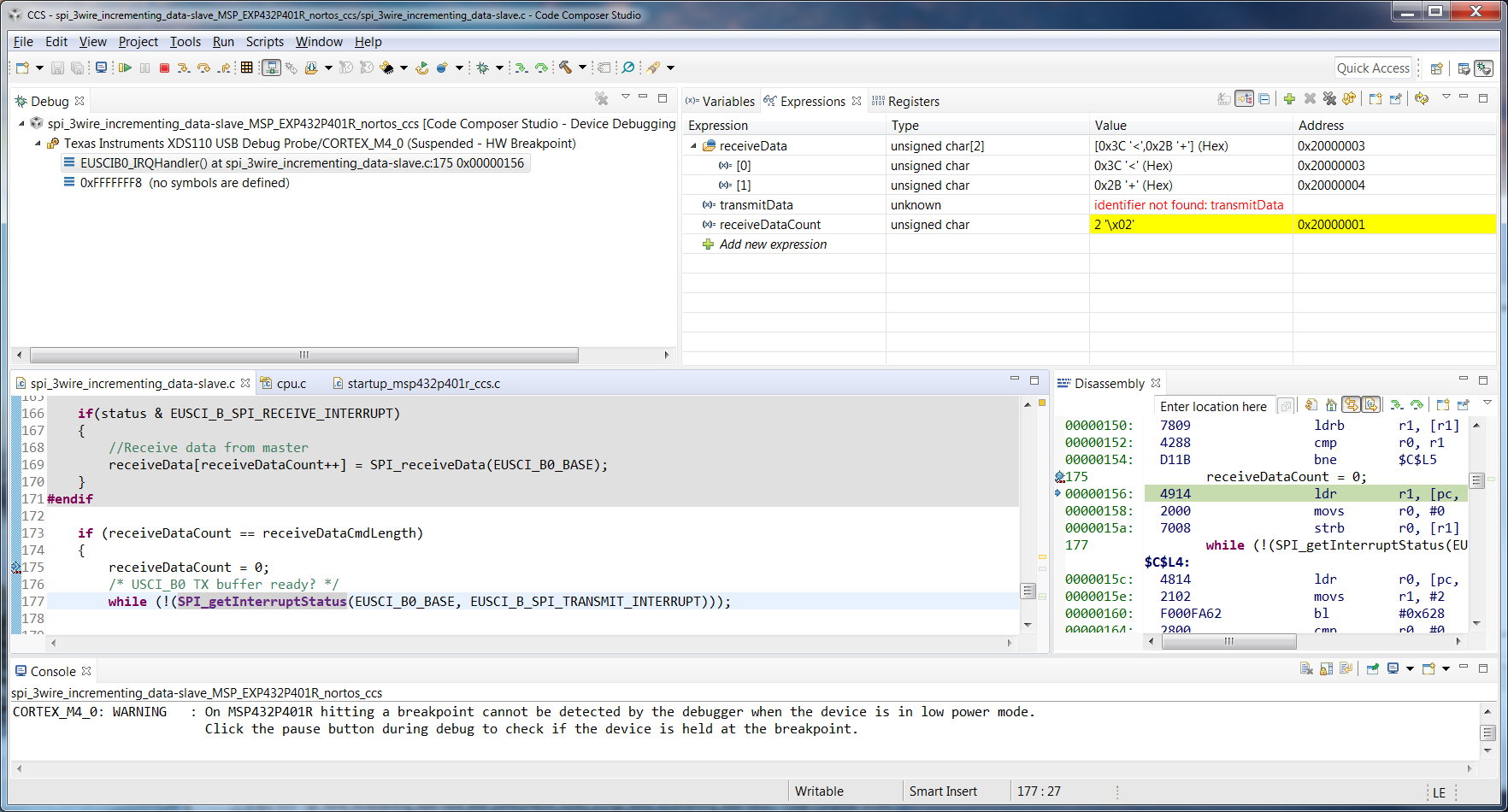
I tried working with some example code from each. Upon startup, the SPI master sends the sequence 0x5678 to the slave. It seems I get the initial 0x56, but not the 0x78 (in fact the code does not seem to enter the ISR, though the master seems to think it is sending it.
Here is the MSP432 slave code (using Code Composer Studio):
-------------
/* --COPYRIGHT--,BSD
* Copyright (c) 2017, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
/*******************************************************************************
* MSP432 SPI - 3-wire Slave Incremented Data
*
* SPI slave talks to SPI master using 3-wire mode. Data is received
* from master and data from slave is then transmitted back to master.
* USCI RX ISR is used to handle communication, CPU normally in LPM0.
* Prior to initial data exchange, master pulses slaves RST for complete
* reset.
*
* Note that in this example, EUSCIB0 is used for the SPI port. If the user
* wants to use EUSCIA for SPI operation, they are able to with the same APIs
* with the EUSCI_AX parameters.
*
* Use with the master version of the code example
*
* MSP432P401
* -----------------
* | |
* | |
* | |
* | P1.6|<- Data In (UCB0SIMO)
* | |
* | P1.7|-> Data Out (UCB0SOMI)
* | |
* | P1.5|<- Serial Clock In (UCB0CLK)
*
*******************************************************************************/
/* DriverLib Includes */
#include <ti/devices/msp432p4xx/driverlib/driverlib.h>
/* Statics */
//static volatile uint8_t transmitData = 0x01, receiveData = 0x00;
static volatile uint8_t transmitData = 0x01;
static volatile uint8_t receiveData[2] = {0,0};
static volatile uint8_t receiveDataCount = 0x00;
static volatile uint8_t receiveDataCmdLength = 0x02;
static volatile uint16_t receiveDataCmd = 0x5678;
/* SPI Slave Configuration Parameter */
const eUSCI_SPI_SlaveConfig spiSlaveConfig =
{
EUSCI_B_SPI_MSB_FIRST, // MSB First
EUSCI_B_SPI_PHASE_DATA_CHANGED_ONFIRST_CAPTURED_ON_NEXT, // Phase
EUSCI_B_SPI_CLOCKPOLARITY_INACTIVITY_LOW, // Normal Polarity
EUSCI_B_SPI_3PIN // 3wire mode
};
int main(void)
{
/* Stop watchdog timer */
WDT_A_holdTimer();
/* Selecting P1.5 P1.6 and P1.7 in SPI mode */
GPIO_setAsPeripheralModuleFunctionInputPin(GPIO_PORT_P1,
GPIO_PIN5 | GPIO_PIN6 | GPIO_PIN7, GPIO_PRIMARY_MODULE_FUNCTION);
/* Initialize slave to MSB first, inactive high clock polarity and
* 3 wire SPI */
SPI_initSlave(EUSCI_B0_BASE, &spiSlaveConfig);
/* Enable the SPI module */
SPI_enableModule(EUSCI_B0_BASE);
/* Enable Receive interrupt */
SPI_enableInterrupt(EUSCI_B0_BASE, EUSCI_B_SPI_RECEIVE_INTERRUPT);
Interrupt_enableSleepOnIsrExit();
Interrupt_enableInterrupt(INT_EUSCIB0);
Interrupt_enableMaster();
PCM_gotoLPM0();
}
//******************************************************************************
//
//This is the EUSCI_B0 interrupt vector service routine.
//
//******************************************************************************
void EUSCIB0_IRQHandler(void)
{
uint32_t status;
status = SPI_getEnabledInterruptStatus(EUSCI_B0_BASE);
SPI_clearInterruptFlag(EUSCI_B0_BASE, status);
if(status & EUSCI_B_SPI_RECEIVE_INTERRUPT)
{
//Receive data from master
receiveData[receiveDataCount++] = SPI_receiveData(EUSCI_B0_BASE);
}
if (receiveDataCount == receiveDataCmdLength)
{
receiveDataCount = 0;
}
}
-------------