Other Parts Discussed in Thread: MCF8316A, MCT8316Z
Hello,
I asked and solved the problem that the motor does not rotate well in the closed loop.
But I still have some problems.
(1) Motor does not rotate stably at low speed (30 [fps])
When the speed drops below about 40 [fps], it often stops.
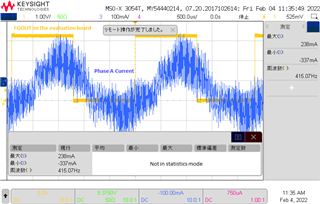
(2) If the torque load fluctuates, the motor cannot maintain its speed.
Especially low speed rotation is difficult with my low power motor.
My motor has an encoder, but it doesn't have A, B, C phase Hall sensors...
{
"signature": "oneui-register-data",
"data": [
[
{
"idx": 0,
"id": "isd_config",
"value": "0x04638C20"
},
{
"idx": 1,
"id": "rev_drive_config",
"value": "0x283AF064"
},
{
"idx": 2,
"id": "motor_startup1",
"value": "0x0A8407D0"
},
{
"idx": 3,
"id": "motor_startup2",
"value": "0x1382E034"
},
{
"idx": 4,
"id": "closed_loop1",
"value": "0x0D3201B4"
},
{
"idx": 5,
"id": "closed_loop2",
"value": "0x1AADD858"
},
{
"idx": 6,
"id": "closed_loop3",
"value": "0x28800000"
},
{
"idx": 7,
"id": "closed_loop4",
"value": "0x0A004870"
},
{
"idx": 8,
"id": "speed_profiles1",
"value": "0x000007E8"
},
{
"idx": 9,
"id": "speed_profiles2",
"value": "0x70000000"
},
{
"idx": 10,
"id": "speed_profiles3",
"value": "0x00000000"
},
{
"idx": 11,
"id": "speed_profiles4",
"value": "0x00000000"
},
{
"idx": 12,
"id": "speed_profiles5",
"value": "0x00000000"
},
{
"idx": 13,
"id": "speed_profiles6",
"value": "0x00000000"
}
],
[
{
"idx": 0,
"id": "fault_config1",
"value": "0x5FE8820E"
},
{
"idx": 1,
"id": "fault_config2",
"value": "0x74008000"
}
],
[
{
"idx": 0,
"id": "pin_config",
"value": "0x2DD0E480"
},
{
"idx": 1,
"id": "device_config1",
"value": "0x08000001"
},
{
"idx": 2,
"id": "device_config2",
"value": "0x00003000"
},
{
"idx": 3,
"id": "peri_config1",
"value": "0x00000000"
},
{
"idx": 4,
"id": "gd_config1",
"value": "0x00000000"
},
{
"idx": 5,
"id": "gd_config2",
"value": "0x00000000"
}
],
[
{
"idx": 0,
"id": "ana_trim3",
"value": "0x48004800"
},
{
"idx": 1,
"id": "ana_trim4",
"value": "0x00000000"
},
{
"idx": 2,
"id": "ana_trim5",
"value": "0x00000013"
},
{
"idx": 3,
"id": "ana_trim6",
"value": "0x00000000"
},
{
"idx": 4,
"id": "ana_trim7",
"value": "0x00000000"
},
{
"idx": 5,
"id": "ana_trim8",
"value": "0x00005C95"
},
{
"idx": 6,
"id": "ana_trim9",
"value": "0x008D55D7"
},
{
"idx": 7,
"id": "ana_trim10",
"value": "0x537E013A"
}
],
[
{
"idx": 0,
"id": "int_algo_1",
"value": "0x00020000"
},
{
"idx": 1,
"id": "int_algo_2",
"value": "0x00000140"
}
],
[
{
"idx": 0,
"id": "gate_driver_fault_status",
"value": "0x00000000"
},
{
"idx": 1,
"id": "controller_fault_status",
"value": "0x00000000"
}
],
[
{
"idx": 0,
"id": "algo_status",
"value": "0x0E7E0000"
},
{
"idx": 1,
"id": "mtr_params",
"value": "0x00000000"
},
{
"idx": 2,
"id": "algo_status_mpet",
"value": "0x0A000000"
}
],
[
{
"idx": 0,
"id": "algo_ctrl1",
"value": "0x00000000"
}
],
[
{
"idx": 0,
"id": "algo_debug1",
"value": "0x00000000"
},
{
"idx": 1,
"id": "algo_debug2",
"value": "0x00000000"
},
{
"idx": 2,
"id": "current_pi",
"value": "0x0005813D"
},
{
"idx": 3,
"id": "speed_pi",
"value": "0x00000000"
}
],
[
{
"idx": 0,
"id": "speed_ref_closed_loop",
"value": "0x00000000"
},
{
"idx": 1,
"id": "vm_voltage",
"value": "0x0348C000"
},
{
"idx": 2,
"id": "voltage_gain_feedback",
"value": "0x00000001"
},
{
"idx": 3,
"id": "csa_gain_feedback",
"value": "0x00000003"
},
{
"idx": 4,
"id": "phase_voltage_va",
"value": "0x00000000"
},
{
"idx": 5,
"id": "phase_voltage_vb",
"value": "0x00000000"
},
{
"idx": 6,
"id": "phase_voltage_vc",
"value": "0x00000000"
},
{
"idx": 7,
"id": "id_ref_closed_loop",
"value": "0x00000000"
},
{
"idx": 8,
"id": "iq_ref_closed_loop",
"value": "0x00000000"
},
{
"idx": 9,
"id": "id",
"value": "0x00000000"
},
{
"idx": 10,
"id": "iq",
"value": "0x00000000"
},
{
"idx": 11,
"id": "vd",
"value": "0x00000000"
},
{
"idx": 12,
"id": "vq",
"value": "0x00000000"
},
{
"idx": 13,
"id": "ialpha",
"value": "0x00000000"
},
{
"idx": 14,
"id": "ibeta",
"value": "0x00000000"
},
{
"idx": 15,
"id": "valpha",
"value": "0x00000000"
},
{
"idx": 16,
"id": "vbeta",
"value": "0x00000000"
},
{
"idx": 17,
"id": "bus_current",
"value": "0xFFFFFF9C"
},
{
"idx": 18,
"id": "ipd_state",
"value": "0x00000000"
},
{
"idx": 19,
"id": "isd_state",
"value": "0x00000000"
},
{
"idx": 20,
"id": "algorithm_state",
"value": "0x00000000"
},
{
"idx": 21,
"id": "phase_current_a",
"value": "0x00000000"
},
{
"idx": 22,
"id": "phase_current_b",
"value": "0x00000000"
},
{
"idx": 23,
"id": "phase_current_c",
"value": "0x00000000"
},
{
"idx": 24,
"id": "ipd_angle",
"value": "0x00000000"
},
{
"idx": 25,
"id": "isd_speed",
"value": "0x00000000"
},
{
"idx": 26,
"id": "speed_ref_open_loop",
"value": "0x00000000"
},
{
"idx": 27,
"id": "iq_ref_open_loop",
"value": "0x00000000"
},
{
"idx": 28,
"id": "iq_ref_rotor_align",
"value": "0x00000000"
},
{
"idx": 29,
"id": "ed",
"value": "0x00000000"
},
{
"idx": 30,
"id": "eq",
"value": "0x00000000"
},
{
"idx": 31,
"id": "theta_est",
"value": "0x00000000"
},
{
"idx": 32,
"id": "speed_fdbk",
"value": "0x00000000"
},
{
"idx": 33,
"id": "sin_commutation_angle",
"value": "0x0503BDA8"
},
{
"idx": 34,
"id": "cos_commutation_angle",
"value": "0x00000000"
}
]
]
}
Thanks,
Tetsuya K