Hi team,
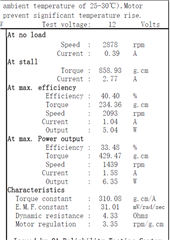
According to the specification, the motor speed can be controlled by PWM in three ways. However, after the motor is controlled by GUI software, I made the following Settings, none of which can control the motor speed:
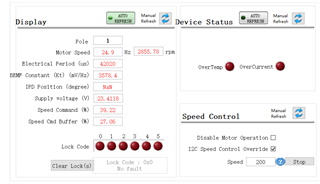
1. Set the value of speed in speed control. The motor speed is always 25Hz, but the speed command changes with the set value
2, J2 jumper to 1-2, use analog input speed pin, change analog input voltage through potentiometer, motor speed does not change
3, J2 jumper to 2-3, use PWM input with speed pins, through the signal generator output PWM signal, real-time change duty ratio motor speed does not change.
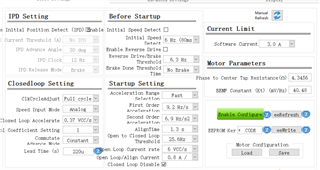
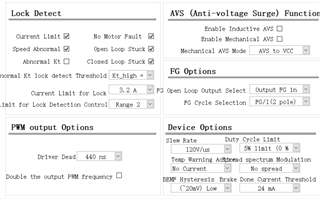
How to use these three ways to control the motor speed? Here are the GUI software Settings.
In addition, during the operation of the motor, after shaking the motor to stop its rotation, the motor cannot rotate itself again. May I ask whether the parameters can be adjusted to make the motor work again automatically after vibration stop?