Part Number: AM625
Other Parts Discussed in Thread: AM62P, AM62D-Q1, TPS65224-Q1, AM6442, TDA4APE-Q1, AM62A7
Tool/software:
HI TI experts,
I have queries related to supported reset inputs and reset status outputs
Supported Reset inputs
Recommended connections for Reset inputs
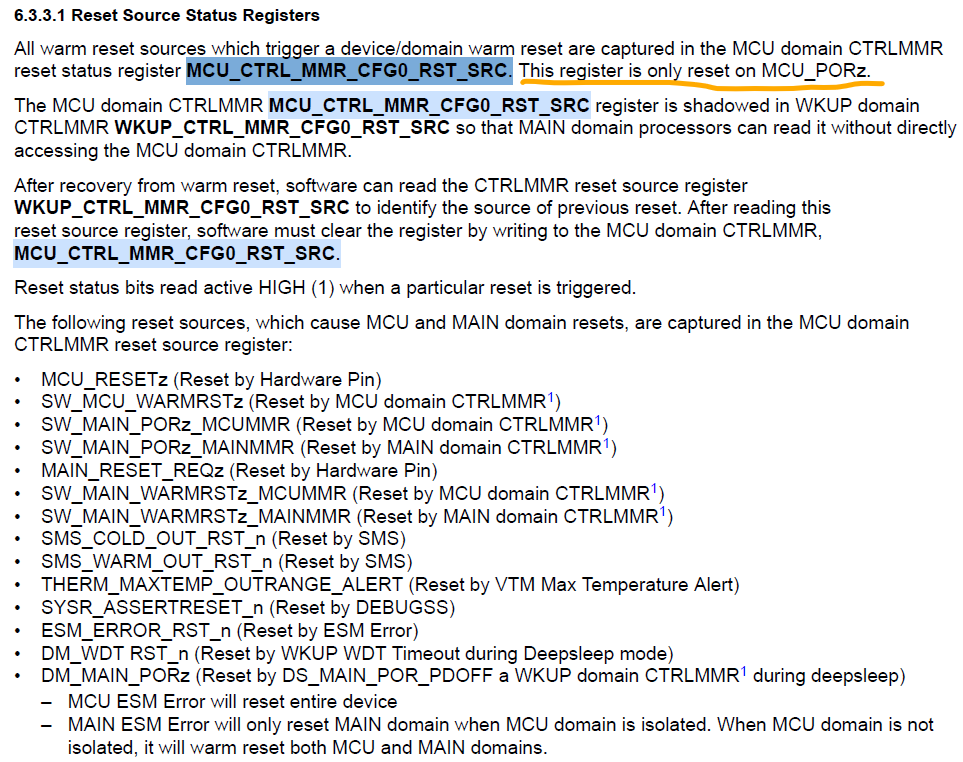
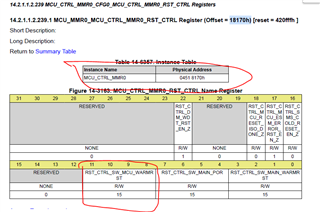
Supported Reset Status outputs
Recommended connections for Reset Status outputs