Hi,
SDK: ti-processor-sdk-rtos-am57xx-evm-06.00.00.07-Windows
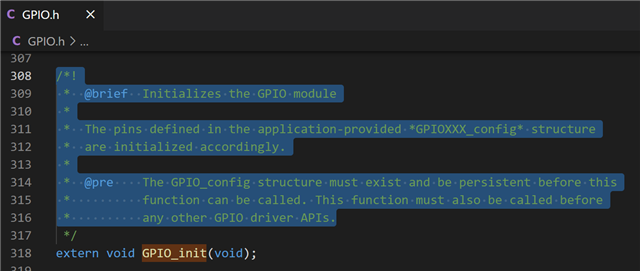
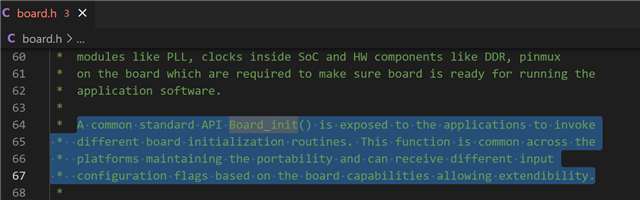
Customer configures GPIO from ARM linux side, but he cannot directly control GPIO unless GPIO_init is added on the DSP side. Is GPIO_init required to be called? What is the role? What is the difference with board_init?