Other Parts Discussed in Thread: SYSBIOS
Hello ,
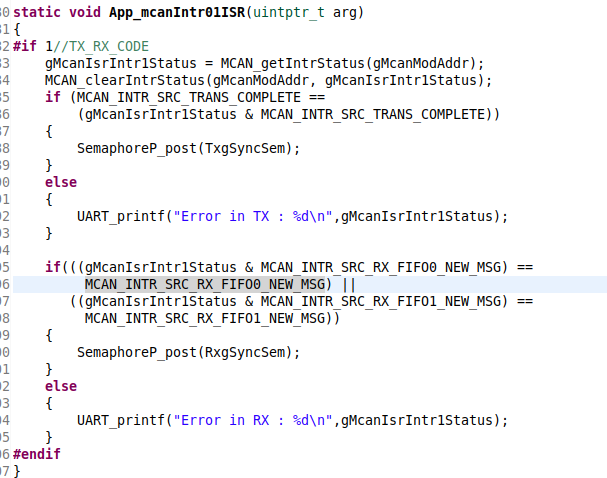
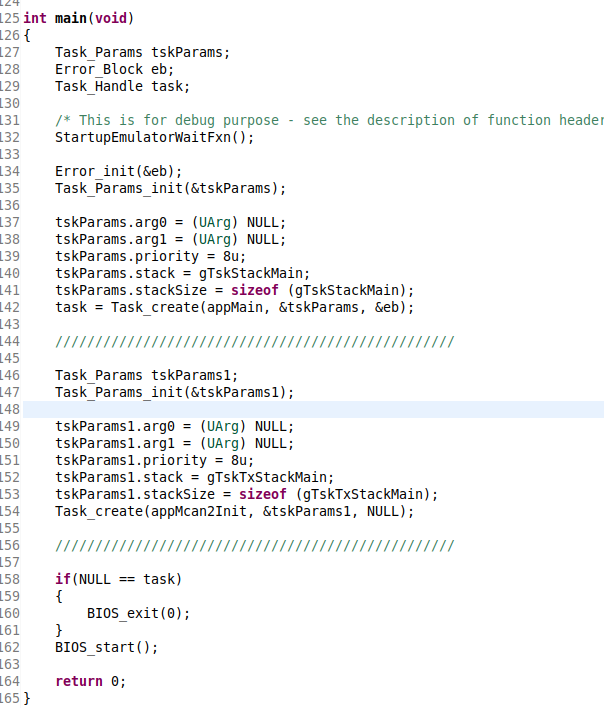
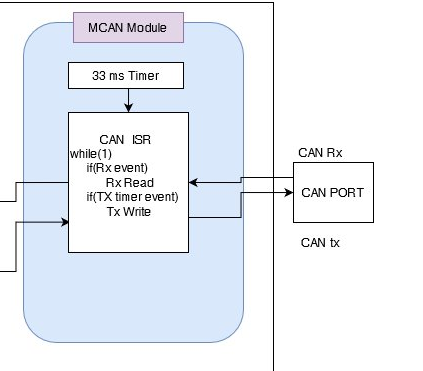
1. Currently we are working on camera based dl demo application.Able to asynchronously perform using MCAN2 either transmission or reception of messages by triggering the appMcan2Init() in appInit() [basic_demos/app_tirtos/common/app_init.c]
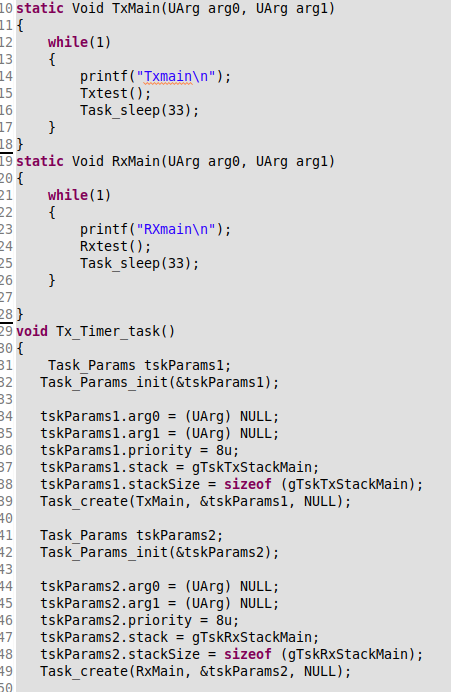
2. Now Tx of messages is happening after every 33ms using Task_sleep()
//pseudo code of Tx
while(1){
Txtest();
Task_sleep(timePeriodInMilliSec);}
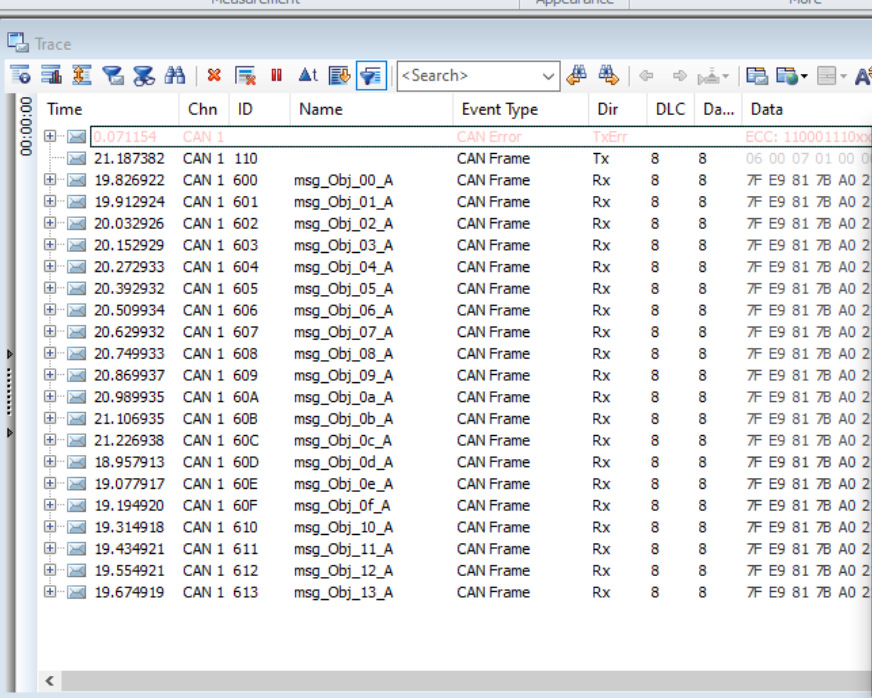
3. Rx is also receiving messages continuously.
//pseudo code of Rx
while(1){
Rxtest();}
4. Our final objective is to allow Tx to happen after every 33ms once dl demo application completes each frame (~33ms) and also continuously receive messages.
Kindly provide some guidance on this.
Thanks and Regards
Pooja Krishna