Other Parts Discussed in Thread: AWR1843, MMWCAS-RF-EVM, TIDEP-01012, AWR2243
Hi,
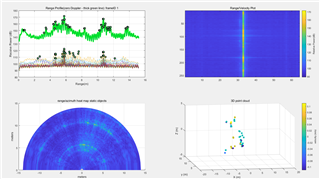
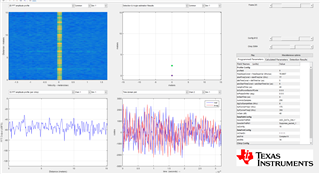
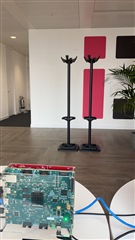
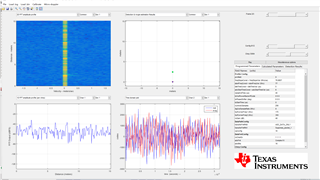
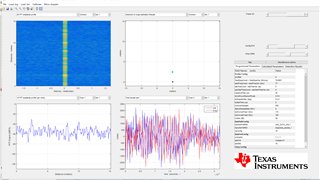
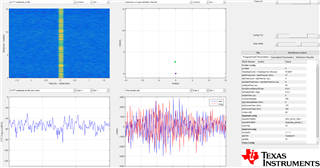
I am using MMWCAS-DSP-EVM to detect 2 metallic water bottle (high reflectivity), and these 2 water bottle are only 130cm away from the radar sensor. However, from the mmWaveStudio post processing plots by the scripts "cascade_MIMO_signalProcessing.m" from the "4chip_cascade_MIMO_example" folder, and also the matlab script I wrote, I think they are not being detected. I tried to zoom in the range-velocity plots and range-azimuth plots, but there is nothing detected in the range of 130cm.