

ミラーに映った像は、実物よりわずかに歪んで見える性質があります。そのため、バックミラーに映る物体は見た目よりも近いところにある、という事実はドライバーに対して長年言われている安全警告です。このような制約があるものの、ミラーはドライバーがバックしたり、車線変更をしたりする際に不可欠なクルマの装備品です。しかし、現在の先進運転支援システム(ADAS)は車載カメラを利用し、運転席からさらに広い視野をドライバーに提供することで、ミラー以上の機能性を備えています。
Eミラー、あるいはスマートミラーとも呼ばれるカメラ・モニタリング・システム(CMS)は、ミラーの機能をカメラとディスプレイを用いて提供するよう設計されています。バックミラーを覗き込んだら、車両の後ろ側がパノラマ表示されているイメージです。サイドミラーには、隣の車両が高解像度で表示されます。このほか、死角の検出や駐車支援などの機能も現実になりつつあります。
ミラーからCMSへの移行の現状を理解することは重要です。現在の車両のシステムが、すでにADAS機能をミラーに利用していることは、驚くべきことではありません。この10年間のほとんどの新車では、車両の後部やサイドミラーにカメラが取り付けられており、車両の後部や横のさまざまな視界をドライバーに提供する、車内ディスプレイが搭載されています。
図1は、このリアビューカメラとディスプレイのシステムのルーティングを示したものです。バックミラーにバックアップ用ディスプレイが内蔵されており、車両の後部へケーブルが配線されています。
 図1:パノラマまたはバックアップビューのためのバックミラーのディスプレイとバックミラーカメラ
図1:パノラマまたはバックアップビューのためのバックミラーのディスプレイとバックミラーカメラ
サイドミラーの場合は、カメラがミラー上に配置されているという点がバックミラーと異なります。一般的には、ドライバーがウインカーを出したり、シフトをバックに入れたりするとカメラが作動します。コーナリングまたは車線変更時には、カメラから、ダッシュボード内のインフォテインメント・ディスプレイに映像が出力されます。この映像は、図2に示すように、サイドミラーに映るものと角度がわずかに異なります。
 図2:サイドミラーと、インフォテインメント・ディスプレイに表示されるカメラの映像
図2:サイドミラーと、インフォテインメント・ディスプレイに表示されるカメラの映像
ここまで、ミラーとカメラ、ディスプレイによる最新のCMS構成について述べてきましたが、さらに、車両後部に1台または2台のカメラを追加することで、CMSバックミラーを実現することも可能となります。
車両後部の撮影装置からの映像データがTIの『DS90UB933』パラレルインターフェイスシリアライザ、またはCamera Serial Interface(CSI)-2搭載の『DS90UB953』シリアライザに入力されます。このデータは、その後、『DS90UB934』または『DS90UB954』デシリアライザに接続されるフラット・パネル・ディスプレイ(FPD)-Link III同軸ケーブル上でシリアル化され、JacintoTM TDAxプロセッサなど、動画処理用のアプリケーション・プロセッサに出力されて、バックミラー・ディスプレイに表示されます。ディスプレイがJacintoアプリケーション・プロセッサから離れた場所に設置されている場合は、再度同軸ケーブル上でデータをルーティングするためのディスプレイ・インターフェイス・シリアライザおよびデシリアライザが必要となります。それぞれ、『DS90UB921』および『DS90UB922』赤緑青(RGB)形式シリアライザおよびデシリアライザを使用することができます。あるいは、高解像度ディスプレイを実装する場合は、『DS90UB947』および『DS90UB948』オープン低電圧差動信号ディスプレイ・インターフェイス(LDI)・デバイスも使用できます。
アプリケーション・プロセッサと合わせて車載ディスプレイを使用する場合のこれらのデバイスの接続を、図3に示します。
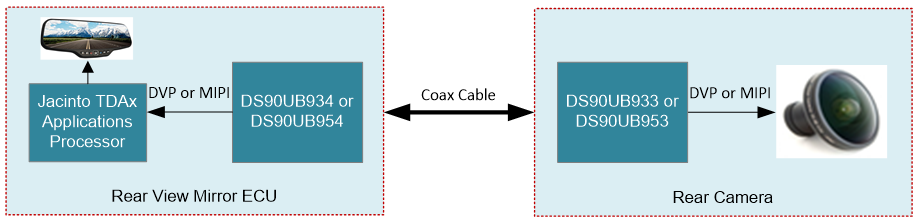 図3:バックミラー・システムのブロック図
図3:バックミラー・システムのブロック図
2つ目のCMSは、サイドミラーに替わるものです。カメラは、これまでサイドミラーがあった場所と同じところに設置しなければなりません。このカメラの映像データには、ドライバーがサイドミラーを見たものが表示されます。これを実現するために、カメラのデータがシリアル化され、FPD-Link III同軸ケーブル経由で、ドアパネルの上部に配置されるか、バックミラー・ディスプレイに含まれるリモート・ディスプレイに送信されます。カメラとディスプレイを利用することで、横の視界をドライバーの目線の位置により近づけることができます。たとえば、横と後ろの両方の視界のディスプレイをバックミラーに含めると、ドライバーは1箇所だけを見ればよいことになります。
サイドミラー代替システムでもう1つ利用できるオプションとして、1つ目と同じ位置に2つ目のカメラを追加して、2つ目の撮影角度を変えるという方法があります。このセットアップを標準のミラーと比較した場合のメリットは、角度の異なる2台のカメラを使うことで、1台のカメラをサイドミラーに映る映像に使用し、2台目のカメラを盲点検出や衝突警告機能用として、より幅広い視野を撮影するために使用できるという点です。2台のカメラによるサイドミラー代替システムを図4に示します。
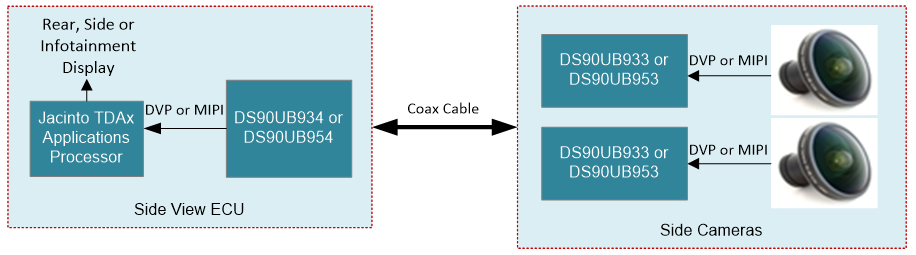 図4:サイドミラー代替システムのブロック図
図4:サイドミラー代替システムのブロック図
さて、ここで、ほぼ同じ機能がミラーでも得られるのにドライバーがカメラとディスプレイを必要とするのはなぜか、という疑問が生じるかもしれません。その答えは、ミラーだけでは足りない機能をカメラが提供できるという点にあります。サイドミラーだけの場合、側面衝突を回避できるかどうかは単純にドライバー次第となります。カメラがあれば、車線変更の前に衝突の危険性を検知し、車両警告アラートをドライバーに発信することで、事故を防ぐことができます。視界(FOV)の広い後部カメラ、または焦点の狭い別個のバックアップカメラによるパノラマリアビューは、ドライバーにさまざまな視線を提供し、死角を減らしたりすることができますが、これは、ミラー単独では不可能な機能です。
しかし、これはまだ始まりにすぎません。車両が運転支援システムから自律運転システムへと移行するためには、CMSをセンサ融合システムに統合する必要があるためです。CMSには、超音波や場合によってはレーダも組み込む可能性があります。後部カメラとサイドカメラと超音波を融合することで、駐車時にドライバーを支援する機能が追加され、車両を自動で駐車させることもできるようになります。サイドミラーとレーダが融合すれば、車線変更時の保護機能や、側面衝突回避機能も強化されます。
センサ融合の実装方法についての詳細は、CMSと超音波を使用した駐車支援センサ融合、または前方カメラおよびレーダとフロントセンサの融合による車線離脱警告、歩行者検出およびブレーキ支援に関するブログ記事(英語)「Maybe hindsight can be better in 2020!」をご覧ください。
参考情報
- 先進運転支援システム(ADAS)
- ホワイトペーパー「車載マルチ・カメラ動作に適した次世代アーキテクチャの実現」
- リファレンス・デザイン:
※Jacintoは、Texas Instruments Incorporatedの商標です。その他すべての商標および登録商標はそれぞれの所有者に帰属します。
※上記の記事はこちらのBlog記事(2018年5月2日)より翻訳転載されました。
*ご質問はE2E Support Forumにお願い致します。
