

消費者が毎日操作する各種システムは、周囲の状況を評価し、それに合わせて動作しています。自動車のアクセル・ペダルを踏むと、自動車はほぼ瞬時に加速します。ペダルを踏んでから加速が始まるまでに、認識可能な遅延はありません。
この記事で扱うトピックにこの例を適用してみましょう。自動車をシステムとした場合、アクセル・ペダルを踏むことが周囲の状況、自動車の速度が出力となります。この場合、システムは「リアルタイム制御」と呼ぶ制御方式を実装していることになります。リアルタイム制御とは、データの収集、そのデータの処理、およびシステムの更新を既定の時間枠内で行う閉ループ・システムの能力を指します。システムがこの定義済み時間枠に間に合わない場合、その安定性、精度、効率は低下します。制御機能が低下した場合、システム性能に有害な影響を及ぼす可能性があります。たとえば、必要な速度を実現できない、または過熱が生じる事態です。この記事では、リアルタイム制御システムを構成する機能ブロックについて説明し、ロボット・アプリケーションを例として示します。
通信機能は必ずしもシステムの制御に関係しているとは限りませんが、他のシステム・コンポーネントとの通信機能がメイン制御ループ内に共存しているのが一般的です。リアルタイム制御に関係している主な機能ブロックは、センシング (データの収集)、制御 (データの解釈と使用)、アクチュエーション (システムの更新) です (図 1)。
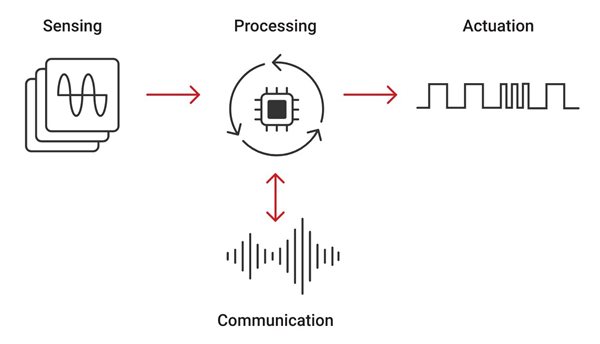
図 1:リアルタイム制御ループの主な機能ブロック
これらのコンポーネントに順に注目しましょう。
- センシングとは、電圧、電流、モーターの速度、温度のような外部要素を測定する機能を意味します。特定の時点で発生している状況を示す、信頼性の高いデータをシステムに渡せるように、これらの重要なパラメータを正確に高精度で測定する必要があります。
- 入力されたデータに対して CPU (中央演算装置) は制御手法を適用し、計算を通じて次の出力コマンドを生成します。C2000 リアルタイム・マイコン、Sitara Arm® ベース・マイコン、統合型ブラシレス DC モーター・ドライブ、DC/DC コントローラのような各種マイコン (MCU) やコントローラには、高い処理能力があり、最小の時間枠でシステムが確実に機能を実行するのに役立ちます。時間枠は通常、マイクロ秒 (μs) からミリ秒 (ms) の範囲内です。
- アクチュエーションとは、計算によって求めた出力コマンドをシステムに適用し、出力を制御することを意味します。アクチュエーションの一例は、パワー・エレクトロニクス・システムを駆動している PWM (パルス幅変調) ユニットのデューティ・サイクルを変更することです。アクチュエーションの強化に役立つ TI の製品に該当するのは、アナログ・ドライバ、絶縁型ゲート・ドライバ、ゲート・ドライバを内蔵した GaN (窒化ガリウム) FET (電界効果トランジスタ) などです。
- 最後に、FSI (高速シリアル・インターフェイス) やイーサネットのようなデタミニスティック (確定的) な高速通信インターフェイスは、システムと外部デバイスまたは内部コンポーネントの間で、適切な時間枠内での通信を実現します。
たとえば、ロボットの場合、リアルタイム制御はモーターの位置と速度を高精度で制御し、誤差 100μm 未満の精度でロボット・アームの位置決めを行います。このような高精度を実現できるのは、モーターの電流と電圧、さらにモーターの位置を定期的に測定しているからです。図 2 に示すように、処理ユニットは実際に測定した値を、計算によって求めた値と比較します。その結果に基づき、処理ユニットは PWM 信号に調整を加えてモーターに渡します。精度とタイミングに関するシステムのニーズに対応できるように、これらのプロセス全体をわずか数 μs で実行する必要があります。
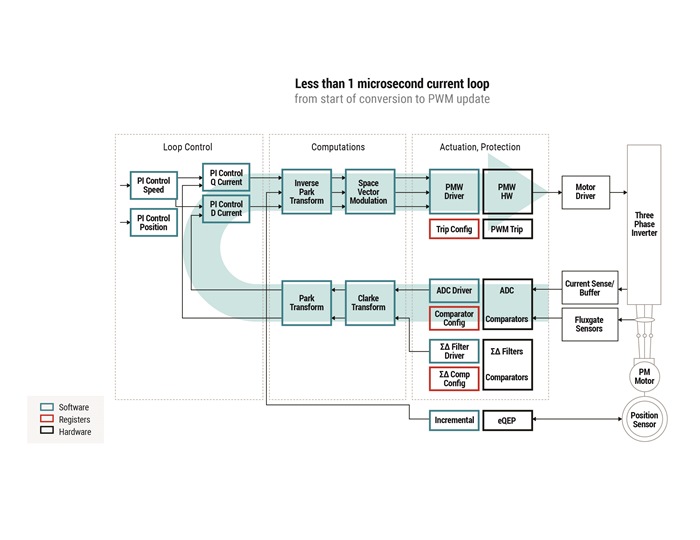 図 2:高速電流ループの図
図 2:高速電流ループの図
また、リアルタイム制御は、効率的で信頼性の高い電源システムの土台でもあります。
たとえば、自動車のバッテリの寿命を維持し、過熱を防止できるように、リアルタイム制御は充電ステーションの出力電力を安定した値に維持し、自動車のバッテリに流入する電流のレギュレーションを行うのに役立ちます。リアルタイム制御を、マイコンやGaNのような新しい技術と組み合わせると、電力密度と効率を高め、アプリケーション内の電力損失を最小限に抑えることが可能です。
最新のモーター・ドライブ・システムの性能が継続的に向上しているのに伴い、リアルタイム制御の要件も厳しさを増しています。たとえば、非常に高速で高精度のコンピュータ数値制御装置 (グラインダーや旋盤のような多様な複合機械を制御する装置) は、誤差 5μm 未満の精度を達成すると同時に、20,000rpm (回転/分) 以上の回転速度を実現します。このような機能を実現できるのは、超高速な制御ループを採用している場合のみです。超高速とは、信号の測定から、システムに調整を加えるまでの時間的遅延として、通常は 1μs 未満の値を達成できることを意味します。
時間に厳しい制約のある計算負荷に対応するために、多くの設計者は FPGA (フィールド・プログラマブル・ゲート・アレイ)、高速な外部 A/D コンバータ (ADC)、複数のマイコンを組み合わせて使用します。一方、TI の C2000 マイコンと Sitara プロセッサは高水準のアナログ統合を実現しているので、設計者は FPGA などを使用しなくても、遅延時間 1μs未満の電流ループを実現することができます。このようなループは、高速電流ループに分類できます。最新の制御トポロジーの一部として高速電流ループを使用すると、設計者はシステムを開発する際に、小型化と高性能化、さらに低コスト化を実現できます。
また、TI の 『MCF8316』モーター・ドライバのようなフル統合型ソリューションを採用し、コストをさらに削減することも可能です。このようなデバイスはブラシレス DC モーターの制御アルゴリズムを事前プログラム (書き込み) 済みなので、設計者はシステムの設計段階でマイコンからシンプルな I2C インターフェイス経由でそのアルゴリズムに微調整を加え、内蔵 EEPROM (電気的消去可能な書き込み可能 ROM) を構成するだけで済みます。これらの製品にはハードウェア構成機能も付属しているので、システム設計者はマイコンを使用しなくてもモーターの調整を実行できます。『MCF8316』はモーターに電流を供給するために 6 個の MOSFET (金属酸化膜半導体電界効果トランジスタ) を内蔵しています。その結果、リアルタイム・モーター制御ソリューション全体を 7mm x 5mm のパッケージに収めています。
リアルタイム制御は、グリッド・インフラ、家電製品、電気自動車とハイブリッド車 (EV/HV)、パワー・デリバリ (電力供給)、モーター・ドライブ、ロボットなどのアプリケーション分野の重要な一部です。これらのどのアプリケーションでも、より高速な応答時間を実現できるように、実行時間枠を短縮する必要性が高まっています。TI の包括的な製品ラインアップは、センシング、処理、制御、通信の各技術を取り揃え、電力効率や性能の改善と、低レイテンシでの応答時間を達成しているので、リアルタイム制御システムの小型化と信頼性向上を実現しやすくなります。
参考情報:
+アプリケーション・ノート(英語):”The Essentials Guide for Developing with C2000 Real-Time Microcontrollers”
+ホワイト・ペーパー(英語):”Time-Sensitive Networking for Industrial Automation”
+技術資料(英語):”Real-Time Control Reference Guide”
+技術記事:”マイコンを活用して自動車電動化設計の利点を最大限に引き出す方法”
+リファレンス・デザイン:”Dual-Axis Motor Drive Using Fast Current Loop (FCL) and SFRA on a Single MCU Reference Design”
TI 製品の詳細については、産業用ロボットのトップ・ページ、およびモーター・ドライブ・システムのトップ・ページをご覧ください。
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※上記の記事はこちらの技術記事(2022年4月6日)より翻訳転載されました。
※ご質問はE2E Support Forumにお願い致します。