- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
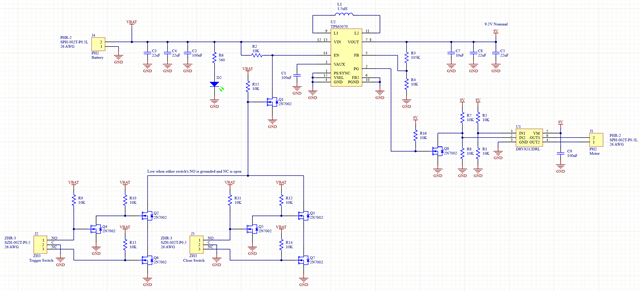
I'm using a DRV8212 to control a motor in a handheld surgical instrument. When you press the button on the handle, a voltage regulator (9.2V nominal) is enabled. Once the power good output goes high, one of the DRV8212's inputs is pulled low while the other continues to be pulled high, and the motor spins. When the button is released, both outputs are pulled high, and the DRV8212 brakes the motor. There is a secondary switch that keeps the motor on until it finishes a complete rotation. The two switches are connected to a fault-tolerant OR-ing circuit that enables the voltage regulator.
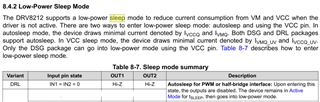
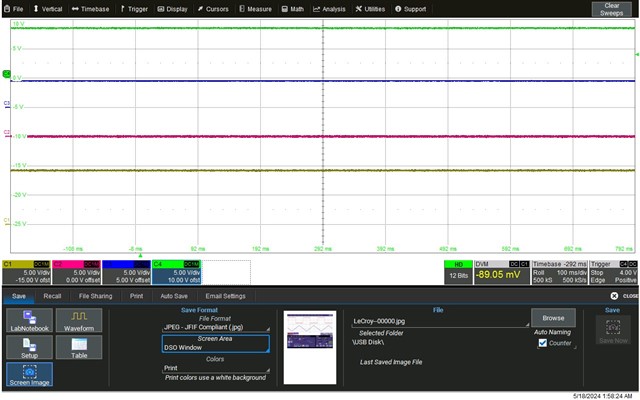
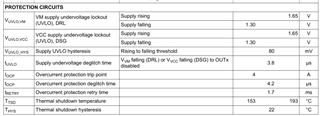
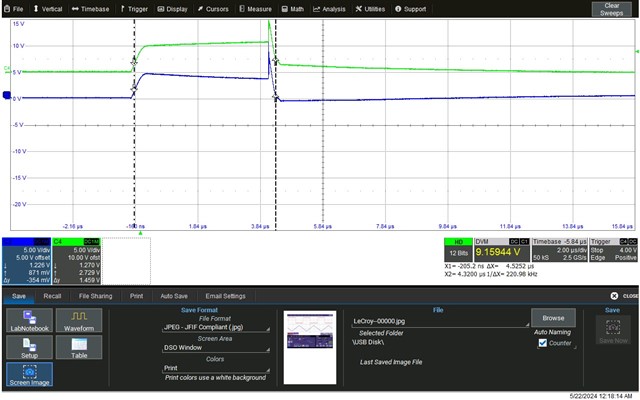
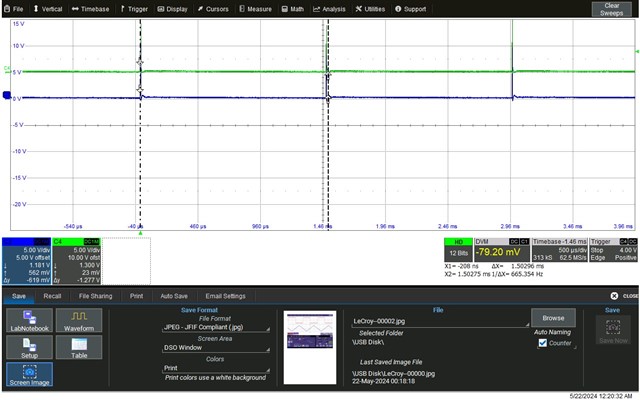
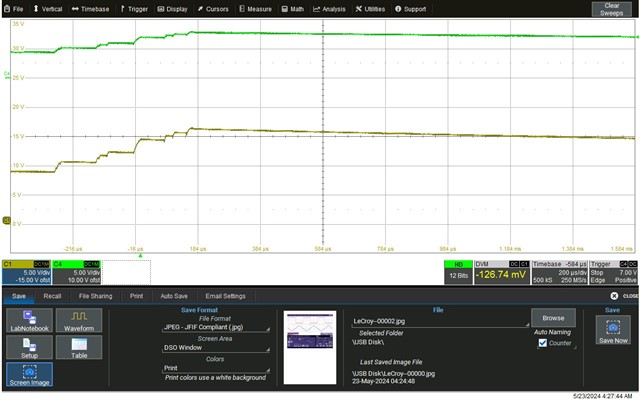
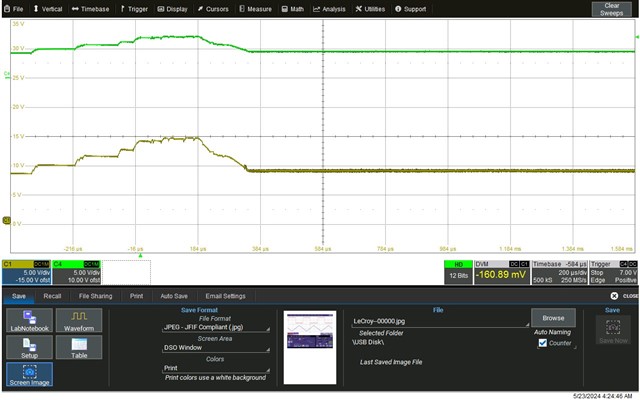
The problem I'm seeing is that sometimes the DRV8212 is going into a strange state where it no longer responds to the input signals and its outputs produce small pulses every 1.5mS. Power cycling the chip seems to be the only way out of this state. Unplugging the motor has no effect and the DRV8212 is still in the bad state when the motor is plugged back in, so I don't believe it's an overcurrent problem. When it's in the failed state, IN1 is high, IN2 is low and the outputs are both doing those small pulses every 1.5mS. The bad state is rare, but has shown up on occasion in the O.R. I've been able to get it to happen by quickly pressing and releasing the button repeatedly over five minutes or more.
I've scoured the datasheet, app notes and forums for a symptom like this but have found nothing relevant. The complete schematic is below. Help would be much appreciated.
Dan