
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.


Original question:

SK-AM62A-LP: camera-Unable to produce image(ds954+ds953+sensor+isp)
hi
sdk version:
mcu_plus_sdk_am62ax_08_06_00_18
ti-processor-sdk-linux-am62axx-evm-08.06.00.45
we follow below link to use can on linux to test,but there has a problem,can't not receive data from remote (it can send some data to remote)
we send data successful ,but the tx count has not update,

then I check the code,the reason should be the irq has not generate


below is my test dts
also I change the irq num like below a or b,Testing didn't work either
a

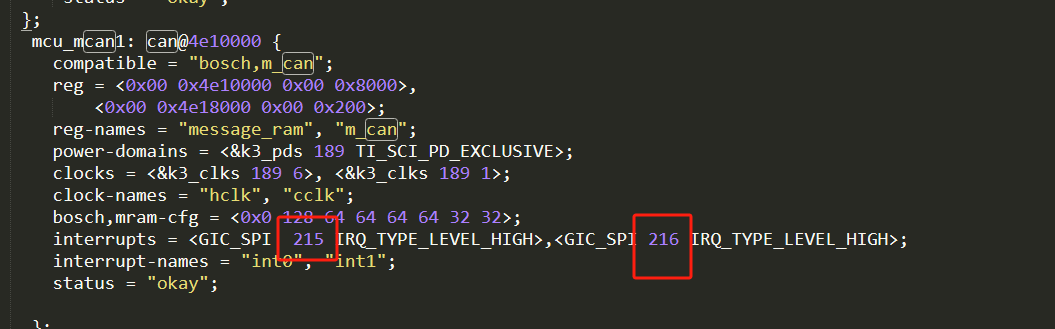
b

so why irq has not generate,irq domain? and how to connect interrupt routes




