- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.


Original question:

flollow case:
I port
examples\drivers\mcan\mcan_loopback_interrupt\am62ax-sk\mcu-r5fss0-0_freertos
to the
examples\drivers\ipc\ipc_rpmsg_echo_linux\am62ax-sk\mcu-r5fss0-0_freertos
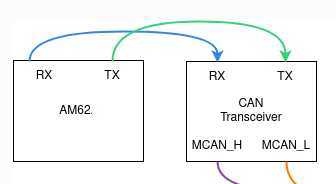
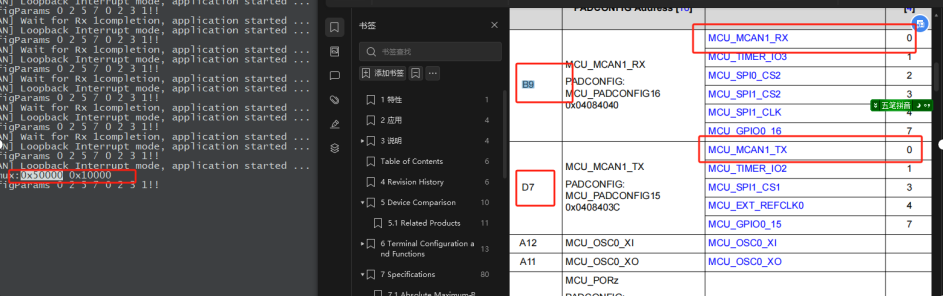
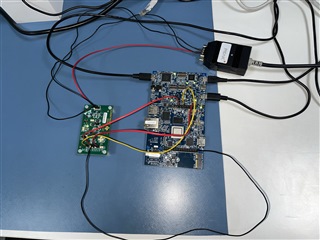
in this way ,I can debug the can,debug use can1 ,the pinmux is right ,but I find I can't no receive data from can box
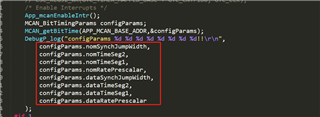
the mcan_loopback_interrupt_main code is :
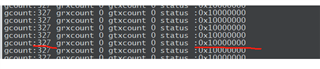
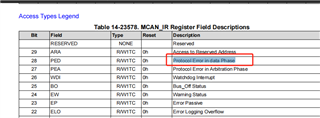
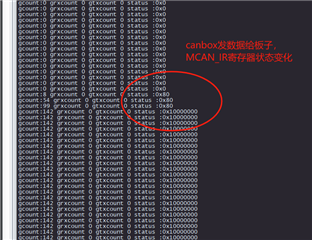
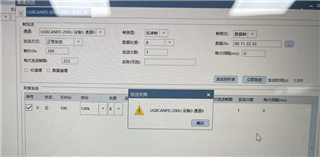
when I send data to mcan(soc),the can box notify send fail,so the can has problem
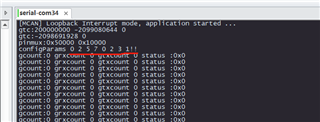
and isr has no irq update
You can see my code for more details