

最近、マイルド・ハイブリッド電気自動車では、48Vと12Vのデュアル・バッテリ電源システムが一般的になってきました。自動車のダイナミックな動作条件では、これら2本のバッテリ・レール間で最大10kWの電力交換が必要になることもあります。走行中の自動車のあらゆる種類の動作シナリオに対応し、電力フローを双方向にリアルタイムで制御しなければならないため、動作はやや複雑になり、デジタル制御手法による知的な機能が必要です。このため、48V-12V双方向電力コンバータの開発を開始した主要な自動車メーカやTier 1サプライヤ各社の多くは、完全デジタル制御手法を採用しています。
完全デジタル・ソリューションには、電流センス・アンプ、パワーMOSFETのゲート・ドライバ、モニタや保護のための回路など数多くのディスクリートのアナログ回路が必要であるため、高価になってしまいます。また、ディスクリート・ソリューションはプリント基板に多くの構成部品が実装されるため体積も大きくなり、信頼性も低下します。一部のTier 1サプライヤは、性能とシステム・レベルの信頼性を向上すると同時に、ソリューション・サイズの縮小とコストの削減を実現するため、マイコンで高レベルの知的な管理を行い、高集積のアナログ・コントローラで電力変換ステージを実装した、ミックスド・アーキテクチャを検討しています。このブログ記事では、このようなアナログ・コントローラに最も適した制御手法について解説します。
表1に、各種の制御手法の利点と欠点をまとめます。
|
制御手法 特長 |
電圧モード |
ピーク電流モード |
普通の平均電流モード |
TI 独自の平均電流モード(LM 5170) |
|
✓ |
|
✓ |
✓ |
|
|
✓ |
✓ |
✓ |
|
|
✓ |
✓ |
✓ |
|
✓ |
|
✓ |
✓ |
|
|
|
✓ |
✓ |
|
|
|
|
✓ |
|
|
|
|
✓ |
表1: 制御手法の比較
通常、48V-12V 双方向コンバータでは、片方のバッテリ・レールから他方のバッテリ・レールに供給する電力量を精密に制御するため、3パーセント以内の高精度の電流安定化機能が必要です。このシステムは高電力であるため、通常、全負荷をサポートするためインターリーブ並列動作のマルチフェーズ回路が必要となり、この共有動作には各相のバランスも必要です。電圧制御モードはマルチフェーズの電流共有を実現できないため、この用途に適しません。
ピーク電流モードの手法は、インダクタのピーク電流をベースにPWM(パルス幅変調)信号を発生します。この手法では、マルチフェーズの電流共有が可能ですが、共有のバランスは電源インダクタの許容誤差に大きな影響を受けます。通常、電源インダクタの許容誤差は±10パーセントであり、これが大きな共有誤差を発生する原因となり、相間に電力損失のアンバランスが発生します。さらに悪いことに、インダクタのピーク電流はDC電流による固有の誤差を持ち、電流安定化の精度がさらに低下し、電力供給の精度はますます悪化します。
普通の平均電流モード手法では、平均化されたインダクタ電流を安定化するとともに、電流安定化動作へのインダクタの許容誤差の影響が小さいことから、ピーク電流モード手法の電流誤差の問題は解決します。しかし電力プラント伝達関数が動作電圧や電流の状態によって変化するほか、双方向動作に2個の独立したループ補償が必要になります。
TIでは、通常の平均電流モード制御手法の問題を解決するとともに、実際の回路実装を簡素化するため、48V-12V双方向コンバータ動作向けの革新的な平均電流モード制御手法を開発しました。この様子を図1にに示します。電力ステージは次の部品で構成されています。
- ハイサイド(高電圧側)FET (Q1)
- ローサイド(低電圧側)FET (Q2)
- 電源インダクタ(Lm)
- 電流センス抵抗(Rcs)
- 2個のバッテリ。片方はHV-Port、他方はLV-Portに接続
制御回路は以下の回路で構成されています。
- 方向コマンドDIR(0または1)で方向を制御される50倍ゲインの電流センス・アンプ
- 電流ループ誤差アンプとして動作するトランスコンダクタンス・アンプ。リファレンス信号(ISET)を非反転ピンに加えることで、その相のDC電流安定値を設定
- PWM コンパレータ
- HV-Port電圧に比例したランプ信号
- DIRコマンド信号で制御される方向切り換え回路。PWM信号で、Q1とQ2のどちらをメイン・スイッチとして使うかを選択
- COMPノードのループ補償回路
Rcs はインダクタ電流をセンスし、センスされた信号は50倍に増幅されます。この信号はトランスコンダクタンス・アンプの反転入力に加わりCOMPノードに誤差信号が発生します。また、このノードはPWMコンパレータの非反転ノードにも接続されています。この誤差信号とランプ信号を比較することでPWM信号を発生します。DIRコマンド信号で方向を制御されるPWM信号で、Q1を降圧モードで動作させてHV-PortからLV-portへ強制的に電流を流します。また、PWM信号をQ2に加えた場合には、電流を逆方向に流します。
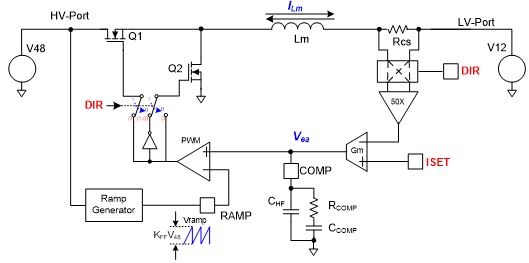
図 1: TI占有の双方向電流コンバータ向け平均電流モード制御手法
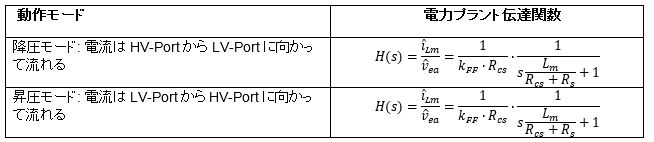
表2: コンバータの電力プラント伝達関数。(KFF はランプ信号発生回路の係数、Vramp = KFF x VHV-Port。 Rsは、Rcs以外の電流経路の実効抵抗の合計値)
表2に、この新しい制御手法の利点を示します。両方向の電力プラント伝達関数は全く同じ、かつ一次システムです。さらに、この伝達関数は各ポートの電圧や電流レベルなどの、動作状態の影響を受けません。このため、すべての動作状態において、この双方向コンバータは単一のType-2補償回路のみで安定動作し、実際の回路実装を大幅に簡素化するとともに、性能を向上できます。
このTI占有の平均電流モード制御手法は、車載の48V-12V双方向電流コントローラに最適です。この手法は、あらゆる動作状態に対して単一のType-2補償回路のみで双方向動作をサポートします。さらに、インダクタの許容誤差の影響が小さい、高電力を自然にバランスさせるマルチフェーズ並列動作などの特長のほかに、高い電流安定化精度を提供し、高性能の双方向コンバータ設計を大幅に簡素化します。TIは、この制御手法を『LM 5170-Q1』マルチフェーズ双方向電流コントローラ製品に実装しました。ハイブリッド電気自動車での電源設計の困難の解決法については、“車載デュアル・バッテリ・システムの48Vレールと12Vレールを相互接続” ブログ記事をご覧ください。
上記の記事は下記 URL より翻訳転載されました。
*ご質問は E2E 日本語コミュニティにお願い致します。
