スマート・シティ、スマート・ファクトリ、スマート・ビルディングを目指して、世界が急速に進歩する中、エントランス・システムも後れを取るわけにはいきません。自動ドアや回転バー式ゲート、ゲート式駐車場のパーキング・バーなどの未来のエントランス・システムは、センサ主導のソリューションを活用し、インテリジェントなシステムを便利で効率よく運用できるようになるでしょう。TIのミリ波センサは、図1に示すような自動ドア、パーキング・バー、工場や倉庫の入り口などのエントランス・システムを設計する際に直面する重要な課題の解決に役立ちます...
 現在の産業界では、モーター・ドライブ、ファクトリ・オートメーション、大電力グリッドなどの幅広い多様なアプリケーションに対して、さまざまなソリューションやアーキテクチャを利用できます。その多くは、安定した性能とコネクティビティを提供しますが、それらは複雑でコストが高く、システム要求を満たすために複数チップを必要とすることもよくあります。絶え間なく進化する市場において、設計の差別化は重要ですが、ビジネスのライフサイクルおよび最終的な長期のサステイナビリティのためには、効率と性能が不可欠です。
現在の産業界では、モーター・ドライブ、ファクトリ・オートメーション、大電力グリッドなどの幅広い多様なアプリケーションに対して、さまざまなソリューションやアーキテクチャを利用できます。その多くは、安定した性能とコネクティビティを提供しますが、それらは複雑でコストが高く、システム要求を満たすために複数チップを必要とすることもよくあります。絶え間なく進化する市場において、設計の差別化は重要ですが、ビジネスのライフサイクルおよび最終的な長期のサステイナビリティのためには、効率と性能が不可欠です。
「どうすれば競争できるか」「ビジネスを維持し、未来に向けて推進するには何が正しい選択か」と、自問することもあるでしょう。問題の中心となるのは、リアルタイム制御とリアルタイム・コネクティビティとの統合機能です。
リアルタイム・コントローラC2000TMの新シリーズである『F2838x』では、産業用および大電力グリッド・アプリケーションにおけるシステム…
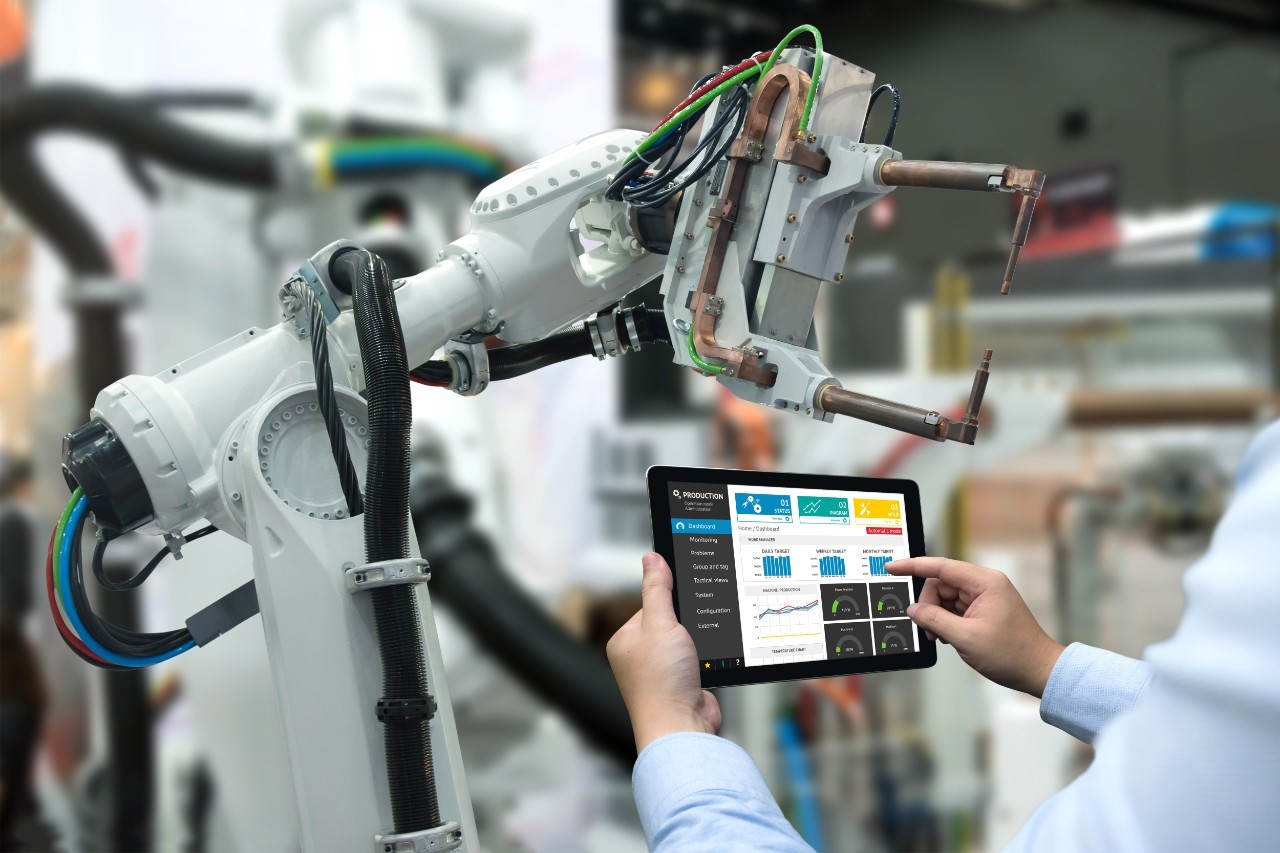
前回のブログ記事では、TIのミリ波センサによる、工場のロボット・アームのエッジ・インテリジェンスの実現方法について説明しました。今回は、ミリ波テクノロジーが自律型ロボットのエッジ・インテリジェンスを提供し、ロボットの動きを遅くしたり停止したりする意思決定をリアルタイムに行い、産業用ロボットアプリケーションにおいて継続的に性能を発揮できる方法について説明します。
衝突事故は人間や他の物と協働するロボットを使用する際に大きな懸念となりますが、TIのミリ波センサは、産業用ロボットの衝突を回避するシステム設計に用いることができます。エッジでの機械学習作業も必要な場合、ミリ波センサは、SitaraTMプロセッサのような産業用グレードのプロセッサとシームレスに連携し、インテリジェンスを強化します。
スマートなロボティクスを実現するTIのミリ波センサとSitaraプロセッサ
車載先進運転支援システムのサラウンドビュー監視や障害物検知にミリ波を利用する場合と同じく…
可変周波数ドライブ(VFD)は、産業用オートメーション機械の重要な一部です。VFDはポンプ、ファン、コンベヤ・ベルト、コンピュータ数値制御(CNC)マシン、ロボット・オートメーション・テクノロジの駆動を助け、工場の総エネルギー消費の削減に貢献します。VFDのダウンタイムは機械類のダウンタイムに直結し、工場停止や生産量低下につながる可能性があります。VFDの信頼性と堅牢性は、機械メーカーと工場のオーナーにとって重要な要件です。
VFDの心臓部である図1の3相インバータ構造は、整流された商用電源電圧を可変周波数および可変電圧に変換してモータに出力します。インバータの堅牢性は、VFDの堅牢性を担う重要な要素です。
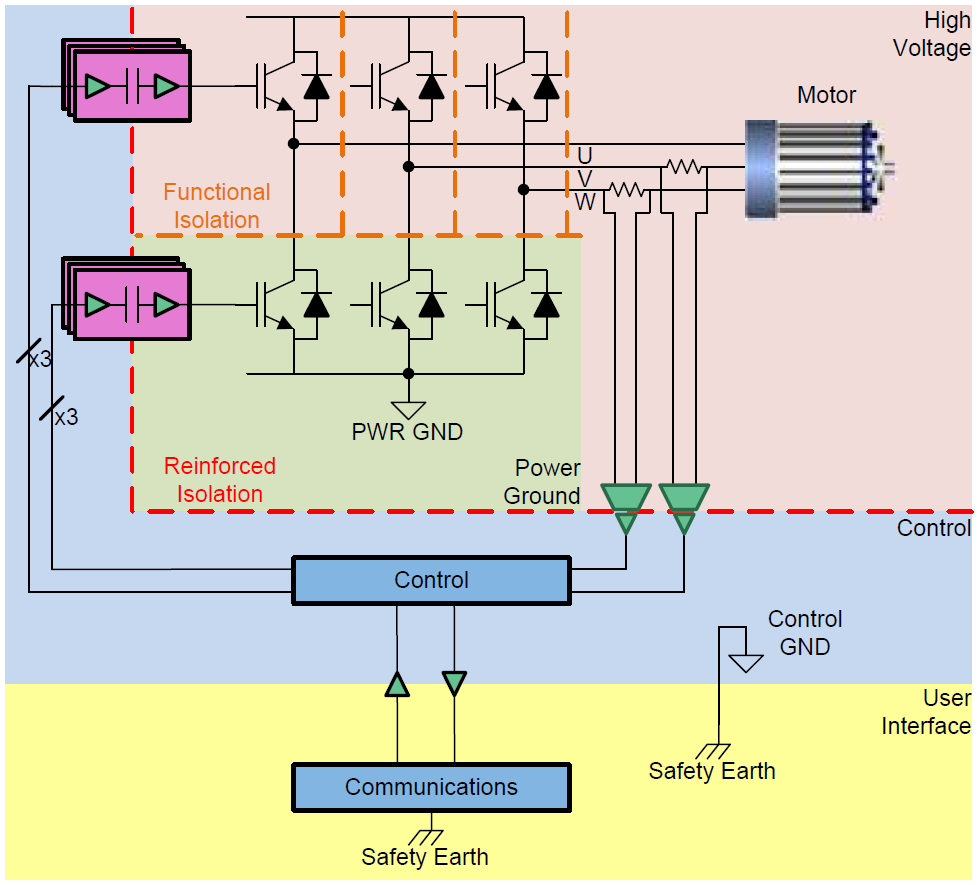 図1:絶縁型ゲート・ドライバを用いた3相インバータ
図1:絶縁型ゲート・ドライバを用いた3相インバータ
3相インバータの主要部品は、絶縁ゲート・バイポーラ・トランジスタ(IGBT)パワー・スイッチ(通常は、単独のIGBTモジュールに内蔵される)とIGBTゲートを制御する絶縁型ゲート…
国連の経済社会局によると、2050年には世界の人口の3分の2が都市に居住することになります。都市化の傾向が急速に強まるなか、人工知能、コンピュータ・ビジョン、人数計測といった建物内部でのスマート人体センシング・テクノロジは、モビリティを改善し、非効率性を軽減し、場合によっては建物の価値を高めます。この記事では、エレベータ・システムのスマート人体センシング・テクノロジにより、どのようにエレベータの利用時間を短縮して利用者体験の向上につなげるかを見ていきます。
図1では、エレベータで目的の階に到着するまでの利用時間を、待ち時間、搭乗時間、移動時間の3つの時間区分に分けて示しています。
 図1:エレベータ利用の時間区分
図1:エレベータ利用の時間区分
現在のエレベータ・システムを設計する重要な目的は、すべての利用者の平均利用時間を短縮することです。例えば16階建ての商用オフィスビルでは、平均利用時間は約70秒、平均待ち時間は約25秒ですが、この時間は1日のうちの時間帯によって変動します…
 無線ネットワークを通して、医者が心臓疾患のある新生児の状態をリアルタイムでチェックできるようになったり、AR(拡張現実)を使って、農家の人が家畜の様子を観察したり、農地の状態を調べたりすることを想像してみてください。
無線ネットワークを通して、医者が心臓疾患のある新生児の状態をリアルタイムでチェックできるようになったり、AR(拡張現実)を使って、農家の人が家畜の様子を観察したり、農地の状態を調べたりすることを想像してみてください。
有線または無線による膨大な量のデータ送受信は、日々の生活に大きな影響を及ぼし、高度なコネクテッド社会の経済を加速させます。そして、この可能性を最大限に活かすには、テクノロジが不可欠です。
あらゆる場面で必要とされるようになったデータ
20世紀が石油と大量生産品の時代であったならば、21世紀はビッグデータの時代です。何十億もの人、何百億もの機器がつながる世界では、データ量が急激に増加し、終わりが見えません。
バーチャル医療やスマート農業からスマートシティやインテリジェント・ファクトリまで、何十億もの新しい電子機器がつながり、大量のデータを生み出すと同時にそれを利用します…
すべての電子システムは、内部の構成要素を同期させるためにクロック回路を使います。
ここ数十年に渡って、クロック信号を発生させるために水晶発振子が使われてきました。水晶発振子は正しいリズムを刻みますが、高価な発振子が劣化し始めるとジッタや周波数の飛びが発生し、長期間の精度に影響を与えます。
TIでは、新しいクロック源としてBAW(バルク弾性波)共振器を内蔵した新型デバイス 2品種を発表しました。人の毛髪よりも細い100μm幅の超小型クロック源は水晶発振器よりも大幅に高い周波数で動作し、より高性能のシステム性能の提供に役立ちます。
5G 通信の出現と、ビッグデータ時代の到来によって、全世界のシステム間で高速伝送されるデータ量がますます膨大になり、高精度のクロック源が必要不可欠な要件となっています。
TIの BAWをベースとした新型製品は内部クロックの性能を劇的に向上し、ビル・オートメーションからバーチャル・ヘルスケアまで、幅広いアプリケーションを高速化します…
 ロボティクスのエキスパートであるMatthieu Chevrierが、
ロボティクスのエキスパートであるMatthieu Chevrierが、
産業用、家庭用、専門サービス・ロボットが日常生活の一部として人間と協力する未来の姿を語ります。
今からそれほど遠くない未来に、スマート・ロボットがあなたのキッチンにいるかもしれません。
こんな生活を想像してみてください。
1日の始まりに、あなたは、センサの分散型メッシュ・ネットワークにより家を監視していたセキュリティ・ロボットに、あいさつをします。そのロボットは、あなたの家をお好みの設定に切り替えることができます。たとえば、ブラインドを上げて、朝のニュースを低音量で流し、コーヒーを豆から挽いて作り、セキュリティ・アラームをオフにするといったようなことです。
スマートフォンには、宅配ロボットが補充用のかみそりと歯磨き粉を家まで配達するために道路を移動中であることが通知されたりします。また、室内で朝の掃除のために動き回るロボットもいるかもしれません。
職場では、協働ロボットが大切なクライアントとのミーティングに備え…
 ディープ・ラーニングにそれほど詳しくないとしても、運転体験の自動化に役立ち、製造効率を高め、消費者のショッピング体験を変えることができる、このキーワード自体は耳にしたこがあるでしょう。ディープ・ラーニングは、人工知能(AI)とマシン・ラーニングを経て生み出された技術進歩です。マシン・ラーニングとディープ・ラーニングはともにAIのサブセットであり、従来のマシン・ラーニングのアルゴリズムは、ドメインレベルの専門知識を持つエンジニアにより特定のプログラミングをする必要がありますが、ディープ・ラーニングのアルゴリズムは、データを読み込ませ、学習するニューラル・ネットワークを活用します。解決すべき問題に専門知識を必要とせず、様々なデータを使って学習させることで、同じネットワークでも実に様々な問題を解決することが可能です。ディープ・ラーニングは、多くの業界に影響をもたらす基礎技術だとみなされています。
ディープ・ラーニングにそれほど詳しくないとしても、運転体験の自動化に役立ち、製造効率を高め、消費者のショッピング体験を変えることができる、このキーワード自体は耳にしたこがあるでしょう。ディープ・ラーニングは、人工知能(AI)とマシン・ラーニングを経て生み出された技術進歩です。マシン・ラーニングとディープ・ラーニングはともにAIのサブセットであり、従来のマシン・ラーニングのアルゴリズムは、ドメインレベルの専門知識を持つエンジニアにより特定のプログラミングをする必要がありますが、ディープ・ラーニングのアルゴリズムは、データを読み込ませ、学習するニューラル・ネットワークを活用します。解決すべき問題に専門知識を必要とせず、様々なデータを使って学習させることで、同じネットワークでも実に様々な問題を解決することが可能です。ディープ・ラーニングは、多くの業界に影響をもたらす基礎技術だとみなされています。
またディープ・ラーニングは、対象物を分類できる技術だと説明できるでしょう…
モーターやポンプは、工場や建物の重要なインフラストラクチャ・コンポーネントであり、その役割を果たすには適切な動作状態が保たれる必要があります。モーターやポンプの役割は、オートメーション・ライン上の物を動かしたり、暖房、換気、空調(HVAC)システム用に冷却液や冷却空気を流したりなどさまざまです。
どんなときであっても、性能低下はメンテナンス費用がかさむことになりかねません。あるいは故障により製造能力が停止状態になるかもしれません。十分な性能を維持するには、これらの機械の潜在的故障の徴候を監視することが不可欠です。その徴候には人間には感知できないものもありますが、製造インフラストラクチャの一部として配備されている低消費電力のスマート・センサ・ソリューションであれば可能です。
モーターの振動解析
システムがもうすぐ故障しそうなとき、動いている部品の状態を知ろうと人間が聞き耳を立てることがあります。しかし、その部品から耳でとらえられるような音が出ないか…
工場での製造活動には多数のモーターやポンプが不可欠です。その機能が故障すると、ラインが完全にストップしてしまうことになりかねません。これを防ぐために通常は幅広い予防保守計画を準備しておき、定期的に実施する必要があります。このような計画は寿命統計に基づくもので、機器の実際の状況には基づいていません。
機器の状況がわかれば、メンテナンス費用を削減でき、予期しない故障の危険性も減らすことができます。機器の状態を認識して修理や交換の予定を立てることを、予防保守と言います。
故障に至るプロセス
最終的に機能的故障に至るまでにはプロセスがあるため、機器の状況を理解することが可能です(図1を参照)。通常、故障までのこのプロセスには時間がかかります(例えば、故障の原因が摩耗や汚染の場合を考えてみてください)。
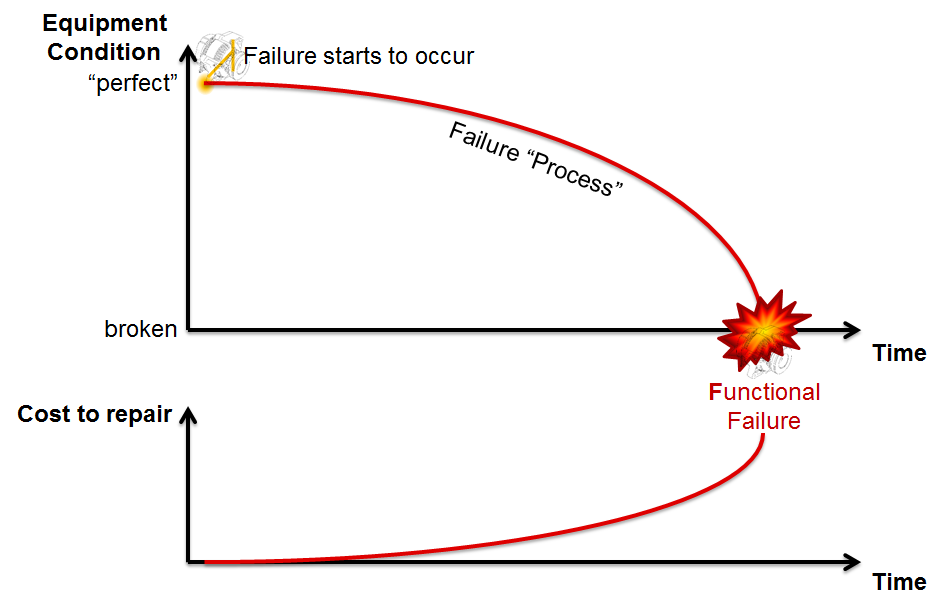
図1:故障までのプロセスと修理にかかる費用
早期の故障を知る指標
幸いにも機器が故障するまで待つ必要はありません。潜在的な故障があることを早期に示すサインや合図があるからです…
店内のすべての商品の紙の値札をすべて手作業で張り替えるには、数週間かかります。この作業は時間だけでなく、コストもかかります。また、大量の用紙が必要になるため環境にも優しくありません。電子棚札(Electronic shelf labels、ESL)は、商品の価格の変更に必要な労働力や用紙の使用を削減し、印刷コストを節約でき、店の収益性と顧客体験の向上に役立ちます。
ESLは商品陳列棚近くにいる買い物客のデバイスと接続し、買い物客の好みやニーズにもとづいてより効果的な広告を提供します。特定の商品の正確な場所を示すことによって商品の選択を支援します。また、買い物客が値札をスキャンしてスマートフォンで支払えるようにすることで、支払いのプロセスを容易にします。
図1に示されている通り、システムは基本的に以下のワイヤレス通信で構成されています。

オートメーションは、私たちの生活の一部である住宅、オフィス、工場に到来しています。スマート・ビルディングやスマート・ファクトリでは、機械や電化製品が自ら考えて相互に対話します。また、ビルの管理者やメーカーは、保有する設備が自律的に動作できるようになる日が来ることを夢見ています。しかし、これはビルや工場だけにとどまりません。自動車は、帰宅中に家の明かりを点けるように住宅に指示を出します。オフィスは、室内にいる人の数に応じて温度を調節します。交通信号は、自動車や歩行者の通行に応じて信号を変えるタイミングを判断します...

それほど遠くない職場へ車で通勤中、信号が青になるまで無駄に時間を取られるということはよくあります。
「自分の進行方向は赤信号なのに、どの方向からも誰も来ない。よく起こることなので、車に乗る前に気分を鎮めることにしています。」
そう語るのはTI産業用レーダ・グループのリーダーであるロバート・ファーガソン(Robert Ferguson)です。彼は、シンプルなレーダ・チップを使えば、信号機が状況を理解し、青に変えることが可能だと知っているため、すべての信号が、TIのミリ波センサを使い、情報に基づいて自ら判断をするようになる日が待ちきれません...
人と機械が継続して関わり合うとき、絶縁が重要な問題になります。電気自動車内のスイッチ、センサや高電圧モータなどをつなぐ配線の総延長は数マイルに達します。産業用コントローラは工場内に設置されたセンサとの間で、データやコマンドのやり取り、及び、電源を供給します。医療用の高電圧デバイスは病室や長期療養施設内の患者を監視します。USBインターフェイスは産業用機器とマイコンを接続します。スマート・コントローラはコマンドを受けて高電圧リレーを制御します。
産業用の機械システムが、電気モータ、センサやアクチュエータに置き換えられて行くに従って、上の例のような、機器同士や人と機器との関わり合いは、ますます拡大して行きます。無骨な機械式スイッチは、敏感で繊細なタッチ制御に置き換えられています。数多くの高電圧動作の電気モータが、急速に増加しています。高電圧で動作する半導体スイッチも頻繁に使われています。そして、これらのすべてが、スマート・コントローラやドライバと通信し…
オートメーションは、ビル、住宅、都市など私たちの世界に革命をもたらしています。そして今日、工場ではインテリジェント・オートメーションが活用されています。プロセス・チェーンはより効率的になり、これまでよりも簡単に保守できるようになっています。ファクトリー・オートメーションでは、固定型と可動型の両方のロボットが、製造から梱包までさまざまな用途に使用されています。人間と機械が「手を携えて」行う作業が多い工程では、人間、自律走行車、動かない物体のような障害物が工場の作業現場に存在する可能性があります。このため、工場内のセーフティ・カーテンやエリア・スキャナなど、工程管理の安全保護による事故管理が必要になっています。図1のように、これらの安全保護によって、人間や物体がロボットの近くに存在しているかどうかを検知できます。
 図1:人または物体とロボットの接近を判定するためにエリア・スキャナを必要とする機械の例
図1:人または物体とロボットの接近を判定するためにエリア・スキャナを必要とする機械の例
安全保護センサで考慮する必要がある主な機能は以下の通りです…
Part 1をまだお読みでない方はこちらから。
機能やメリットについて一日中話していてもいいのですが、エンジニアが本当に知りたいのは実際の回路です。この記事では、ディスクリート型と統合型のゲート・ドライバ・アーキテクチャを直接比較し、両者の基板レベルでの違いを示します。
回路図とレイアウトを比較するうえで重要な2つの指標が、部品数とソリューション・サイズです。1つ目の指標である部品数は、回路図が完成すると比較的簡単に確認できます。しかし、ソリューション・サイズを見積もる方法は、はるかに複雑です。ソリューション・サイズとして集積回路部品のサイズが記載されているのをよく見かけますが、これには外部部品や部品間に必要とされる間隔…
モーター・ドライバの中でも特に素晴らしいのはブラシレスDCモーターです。そう断言するのには理由があります。高効率、大電力、高トルク、低ノイズ、低電磁干渉(EMI)、低振動、長いバッテリ持続時間、長いモーター寿命、高速、優れた製品といったメリットが得られるだけでなく、感動を与える要素や遊び心、インテリジェンスを加えることができるからです。
 図1:ブラシレスDCを実装したアプリケーションの例
図1:ブラシレスDCを実装したアプリケーションの例
ブラシレスDCモーター駆動の興味深い部分は、アルゴリズムです。センサあり/なしでの監視、台形波または正弦波制御、磁界方向制御(FOC)、ブロック整流といったアルゴリズムを実装できます。これから説明するのは、ステップ・ゼロ:モーター駆動システム向けのハードウェア設計についてです。
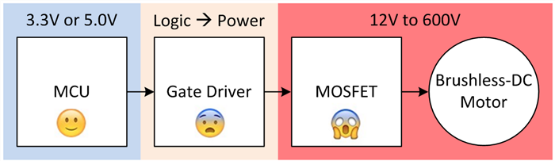 図2:電圧レベルとアナログ成分の増加に伴い快適度が直線的に低下
図2:電圧レベルとアナログ成分の増加に伴い快適度が直線的に低下
大多数のブラシレスDCモーター・システムは大電力や高効率を目的として設計されていることから、実装として最適なのは…
モーター制御は、30V~100VのディスクリートMOSFETのマーケットにおいて、大規模かつ急速に拡大している市場であり、特にDCモーターを駆動する多数のトポロジに利用されています。この記事では、エンド・アプリケーションでモーターを駆動するために使用されるFETをはじめとした、特定のエンド・アプリケーションで考慮すべき具体的な検討事項を紹介します。ここでは、ブラシ付きモーター、ブラシレス・モーター、ステッピング・モーターを駆動するFETを正しく選択することに重点を置いて説明していきます。厳格なルールはほとんどなく、選択手法は場合によっては無数にありますが、エンド・アプリケーションを考慮した場合にどこから始めるべきか、という点で、ヒントを提供できればと考えています。
最初に説明する、おそらく最も簡単に判断できる選択肢が、必要な降伏電圧です。モーター制御は低周波数になる傾向があり、結果として電源アプリケーションに比べて低リンギングになることから…
産業用スタック・ライトや競技場にある大型LEDディスプレイなどのライティング・アプリケーションやLEDサイネージには、電力消費が制限されているという共通の問題があります。産業用途において、これらのライトやサイネージが発する熱を放散し、LEDの寿命を最大限まで延ばすことが重要です。アプリケーションがリニアLEDドライバを使用する時には、リニアLEDドライバでの電圧降下を最小限に留めることが必要です。このためには、LEDの順電圧に基づいて供給するレギュレータの電圧を調整する必要があります。この技術は「ダイナミック・ヘッドルーム制御」と呼ばれます。

図1:RGB LEDドライバ
同一の電流であれば、LEDの電圧降下は温度やプロセスの変動に対して一定のままです。例えば、調整可能なレギュレータの帰還ネットワークを計算して、最小値を少しだけ上回る、0.5Vの残留電圧にできます。リニア・レギュレータが温度の変動やコンポートネントの許容範囲に対しても機能するように十分な電圧降下が必要です…
産業用イーサネット・デバイスに電力を供給するためには、産業用イーサネットと産業アプリケーションの特定の部分に対応する必要があります。標準のイーサネットと産業用イーサネットの最大の違いはトポロジです。詳しくは、図1をご覧ください。標準のイーサネットのトポロジはスター型ですが、産業用イーサネットの場合は、ライン型、ツリー型、リング型のいずれかとなります。
 図1:2種類のイーサネット・トポロジ
図1:2種類のイーサネット・トポロジ
トポロジ以外にも、ファクトリ・オートメーション・デバイスは24Vで動作するのに対し、通信デバイスに供給される電力は48Vという違いもあります。このようなバージョンの違いは以前からありますが、産業界向けイーサネット用の初の電力ソリューションであるEtherCAT Pがちょうどリリースされました。今回のブログ記事では、まずEtherCAT Pの内容について説明してから、1000BASE-Tやリングトポロジまたはシングル・ツイスト・ペア用の代替策を取り上げます…
 TI最高技術責任者(CTO)アハマド・バハイ(Ahmad Bahai)
TI最高技術責任者(CTO)アハマド・バハイ(Ahmad Bahai)
テクノロジ業界をリードする多くの企業が、高精度かつ環境ノイズの影響を受けない、高度に統合されたレーダ・ビジョンの実現を長年にわたって夢見てきました。「レーダ」と聞いて思い浮かべるのは、巨大な飛行機が小さな点で表示される昔ながらのレーダ画面かもしれません。一方、TIが独自にアプローチするミリ波センサは、物体の輪郭を詳細に捉え、分類することができます。
たとえば、粉塵、暗闇、霧、雨などの条件下でも障害物を回避でき、機敏に動き回るマシンや、壁越しに侵入者を視認できるセキュリティ・システム、肉眼では見えない架線を検出するドローン、手術器具の先端でバイオマスを検出する小型レーダ、あるいは動脈壁や声帯の動きを監視できる小型センサなどが、TIミリ波センサを導入することで実現できます。
車載機器、ファクトリ・オートメーション、ビルディング・オートメーション、医療機器などのアプリケーションにおいては…
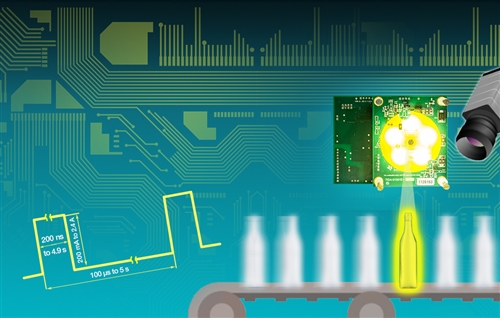 写真家ならば、芸術的観点から、被写体のブレは意図的なものだったと主張することはよくあるでしょう。しかし、画像ベースの自動検出、品質管理、および工場のオートメーションやロジスティクスにおけるコードの読み取りといった、マシン・ビジョンのユースケースでは、取得されたすべての画像には、最高の鮮明さが求められます。
写真家ならば、芸術的観点から、被写体のブレは意図的なものだったと主張することはよくあるでしょう。しかし、画像ベースの自動検出、品質管理、および工場のオートメーションやロジスティクスにおけるコードの読み取りといった、マシン・ビジョンのユースケースでは、取得されたすべての画像には、最高の鮮明さが求められます。
マシン・ビジョン向けの画像
それは、被写体の動きがあるかないかの問題ではなく、動きの速度(v)と画像取得に求められる鮮明さの問題です。
ピクセルのブレが1ピクセル以下というのは、動きを止めるための最適なアプローチです。これは、露出時間(tE)を短くするか、カメラのシャッター、ストロボの点灯時間を制御する、あるいはその両方の方法によって実現できます。等式1をご覧ください。
 ここで、tEは、ある大きさの視野(FOV)とピクセル数(NP)の1ピクセルのブレを達成するために必要な露出時間を示します。図1のように、FOVとNPは両方とも…
ここで、tEは、ある大きさの視野(FOV)とピクセル数(NP)の1ピクセルのブレを達成するために必要な露出時間を示します。図1のように、FOVとNPは両方とも…
たとえば、あなたがスマートオフィスで一人、遅くまで残り、今日最後のメールを書いていたり、集計をまとめようとしていたりするとします。すると突然オフィスの電気が消えました。あなたはモーション・センサが感知するよう立ち上がり手をかざすことで、ようやく電気がつきました。
上記のような体験をされた方がいらっしゃることでしょう。今日のモーション・センサは、屋内に人がいるときに検知能力が落ちることがあり、またオフィスの椅子に一人腰掛けて静かに仕事をしている場合のように、人がじっとしているときにもしばしば機能しません。現在の受動型赤外線(PIR)または超音波モーション・センサの技術は、机で静かに座っている、電話をかけているときなど、微細な動きを忠実に検知することができません。
 図1:室内にいる人を検知できない、PIRや超音波などの今日のモーション・センサ技術
図1:室内にいる人を検知できない、PIRや超音波などの今日のモーション・センサ技術
ミリ波レーダ(mmWave)は、他のセンサ技術では見逃してしまうとても微細な動作も検知できるため…


{kind=link}